《《状态空间设计法》PPT课件.ppt》由会员分享,可在线阅读,更多相关《《状态空间设计法》PPT课件.ppt(17页珍藏版)》请在装配图网上搜索。
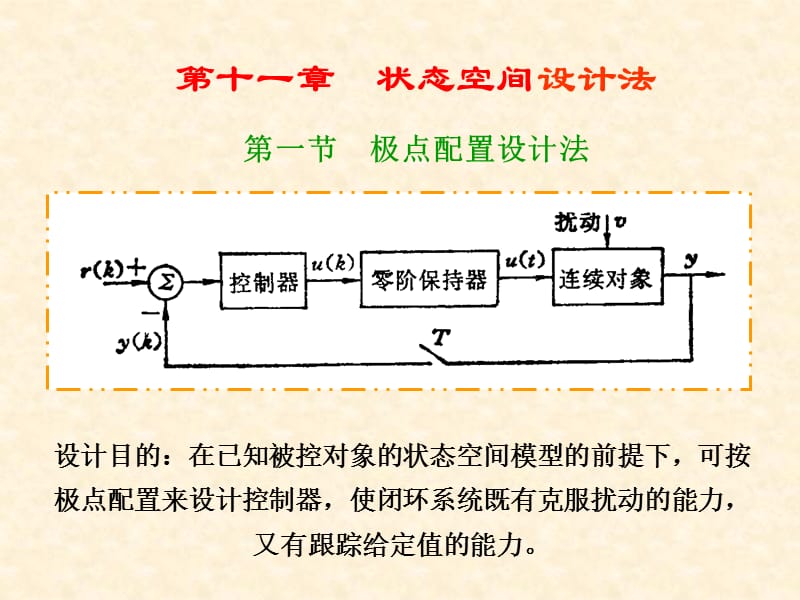
1、第十一章 状态空间设计法 第一节 极点配置设计法,设计目的:在已知被控对象的状态空间模型的前提下,可按极点配置来设计控制器,使闭环系统既有克服扰动的能力,又有跟踪给定值的能力。,,控制器组成: 状态观测器 控制规律,,一、 按极点配置设计控制规律,,设:连续控制对象的状态方程,相应的离散状态方程,假设控制规律是线性状态反馈,闭环系统的状态方程,闭环特征方程,设计反馈控制规律L,使得闭环系统具有所需要的极点配置。,,闭环控制极点:,求得闭环特征方程为:,反馈控制矩阵K应满足方程:,状态完全可控的充要条件是:,系统满足秩的要求,k 就有唯一的解。,对于高阶系统反馈矩阵可用A
2、ckermann公式求解:,,,,,,例:设被控对象完全能控,且对象离散状态方程为:,按极点配置法设计反馈控制系统,使期望极点为 解法1:,令反馈矩阵,特征方程: 对比系数得:,,,,,因此,能控,,,,,解法2:用Ackerman公式求解:,期望特征方程 :,,,,,,,,,,,,,,,第二节 状态观测器设计法,观测器的设计思想:根据能够测量的系统输出量和输入量,重构出全部状态。,全维观测器、降阶观测器。,状态观测器方法:将系统状态变量模拟出来用它来代替真实的状态变量构成反馈系统,这种方法称状态观测器法。,降阶观测器:根据系统可测状态,重构出其余那些不能测量的状态。,按上述系统构造模拟系统:
3、,,,,取误差状态为:,,误差状态特征方程为:,若期望的极点为 ,期望观测器特征多项式:,,,,对于高阶系统,也有Ackerman公式:,,,,,,,,,二、带观测器的状态反馈系统,,由于被控对象取状态较难,从观测器取状态得:,,,,将此方程与误差方程合并,得闭环系统动态方程:,,,,分离定理:状态反馈和观测器可以分别独立设计。它们之间无关联性。,,例:系统的状态方程为,,,,系统状态不可直接获得,按状态观测器法设计 ,,2)求状态反馈,,使期望极点为,,,,解:1)能观矩阵:,,满秩,观测器可任意极点配置,设闭环观测器方程,,误差状态方程的特征方程为,,,,,,,,,,,因此,能控。令反馈矩阵,,则特征方程为,期望特征方程,对比系数得:,
 《状态空间设计法》PPT课件.ppt
《状态空间设计法》PPT课件.ppt