《模型参考自适应控制》由会员分享,可在线阅读,更多相关《模型参考自适应控制(18页珍藏版)》请在装配图网上搜索。
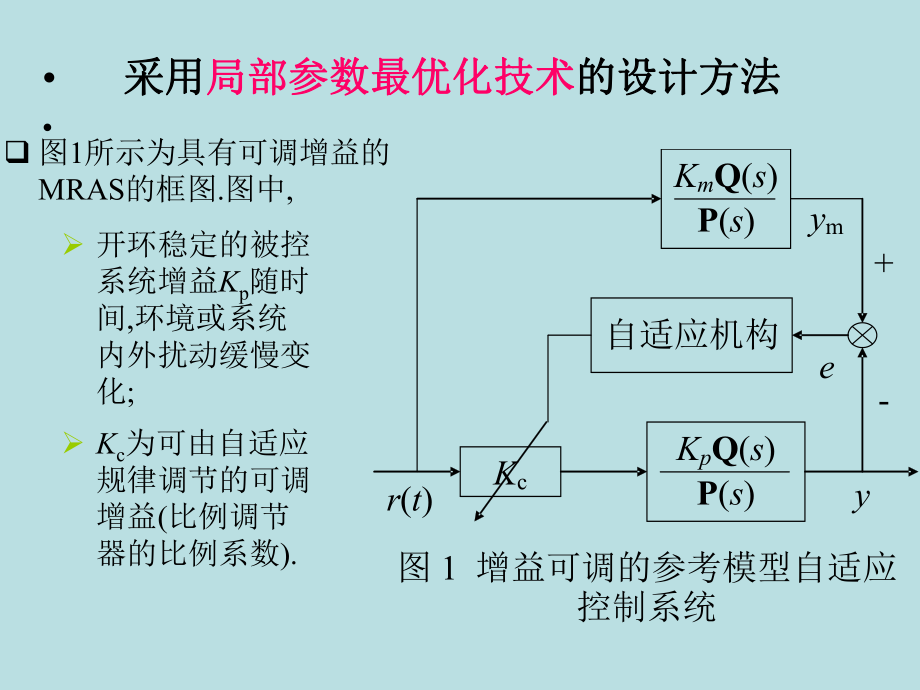
1、采用采用局部参数最优化技术局部参数最优化技术的设计方法的设计方法 r(t)KmQ(s)P(s)KpQ(s)P(s)Kc 自适应机构 y ym e+-图 1 增益可调的参考模型自适应 控制系统 q 图1所示为具有可调增益的MRAS的框图.图中,开环稳定的被控系统增益Kp随时间,环境或系统内外扰动缓慢变化;Kc为可由自适应规律调节的可调增益(比例调节器的比例系数).利用参数最优化技术参数最优化技术求取自适应控制律。1958年由MIT提出,故称为MIT法法。输出广义误差e=ym-y,目的为根据使得J为最小的前提下选择Kc。ttdeJ0)(2ttccdKeeKJ02根据梯度法(最速下降法),如下选择K
2、c:ttcccccdKeeKKJKK0)0()0(步长,0Kc的初值两边对t求导:ccKeeK由r(t)到e(t)的开环传函Ge(s)为:)()()()()()(sPsQKKKsrsesGpcme即e(t)所满足的微分方程为:.,)()()(222dtdDdtdDrDQKKKeDPpcm微分算子:两边对Kc求导:rDQKKeDPpc)()(rDQKyDPmm)()(rsPsQKymm)()(r(t)KmQ(s)P(s)KpQ(s)P(s)Kc 自适应机构 y ym e+-图 1 增益可调的参考模型自适应 控制系统(1)此自适应规律只需要一个积分器和一个乘法器。比较可得:mmpcyKKKe代入(
3、1)得:mmmpceyeyKKK缺点:不能保证稳定性,即e可能发散。r(t)KmQ(s)P(s)Kp(t)Q(s)P(s)Kc(t)y ym e+-图 2 增益可调的参考模型自适应系统 s/设在t=0时,输入r(t)=R(阶跃),假定ym的动态响应比e的自适应调整过程快得多,则当时间充分长以后,ym取稳态值KmR,yp取稳态值Kc(0)KpR,此时输出的广义误差e满足:eRKKeeaeapm212-0212eRKKeeaeapm 212aaRKKpm时,系统不稳定。例:1)()()(122sasaKsPsQKsGpp参考模型:1)(122sasaKsGmm这时闭环自适应控制系统为:mccpme
4、yKrKKKeeaea)(12 rDQKKKeDPpcm)()()(三三 基于基于Lyapunov稳定性理论的设计方法稳定性理论的设计方法 对于设计一个控制系统来说,首要的目标是稳定.MIT方法的最大的缺点是只考虑到优化输出误差和参数误差的某种正性指标函数及这些误差的收敛过程,而不能确保所设计的自适应控制系统闭环是全局渐近稳定的 上世纪60年代中期,Parks提出了用李氏稳定性理论对MRAS进行设计的方法,确保了该类自适应系统的稳定性.1 采用可调系统状态变量构成自适应规律的设计方法采用可调系统状态变量构成自适应规律的设计方法 对一般多变量线性系统,可采用如图3所示的控制器结构。e xm=Am
5、xm+Bmr 自适应机构 Kc Kv xm x r+x=Ax+Bu u+-图 3 用状态变量构成的模型参考自适应系统 设所选定参考模型的状态方程为xm=Amxm+Bmr xm(0)=xm0 (1)其中Am为nn维稳定矩阵,Bm为nm维矩阵.所选定的参考模型(Am,Bm)一般为渐近稳定的,且其状态完全能控能观的.此外参考模型(Am,Bm)应体现对被控系统的输出响应和性能指标的要求,如 超调量、快速性、周期性、阻尼比、动态速降和通频带宽等指标可通过参考模型的选取来体现.实际上,参考模型体现对被控系统输出响应和性能指标的理想化要求.被控系统的状态方程 x=Ax+Bu x(0)=x0设系统的广义状态误
6、差向量则xxemrxeArBKBx-A-BKAeArKxKx-B-AArBeAr-BuBx-AAeAr-Ax-BuBxAxxemcmvmmcvmmmmmmmmmm)()()()()(现在问题为设计Kv和Kc,使得误差系统为渐近稳定。从而有0)(limtet 定义李雅普诺夫函数 miiiniiiPeePeeV1T1TTTTr 其中,分别是 的第i列,P为对称正定矩阵,显然,V正定,而ii,)(2)()()(1T1TTT1TT1TTTTmiiiniiimmmiiiiiniiiiirxPeePAPAeePePeeVQPAPAmm Am为稳定,故必存在有正定矩阵Q满足李亚普诺夫方程:代入上式有:rxe
7、Aem)(2-)(2-1T1T11TT1T1TTTmiiiniiimiiiniiimiiiniiirxPeQeerxPeQeeViirx,分别是向量x,r的第i分量,如果我们选择0)(1T1T11TmiiiniiimiiiniiirxPe即取mirPeniPxeiiii,2,1,-,2,1,-TT则 为负定,从而广义误差系统为渐近稳定。QeeVT-这种方法要求所有状态可测,这对许多实际对象往往不现实,为此可采用按对象输入输出来直接设计自适应控制系统。其中一种为直接法直接法,它根据对象的输入输出来设计自适应控制器,从而来调节可调参数,使可调系统与给定参考模型匹配,另一种为间接法间接法,利用对象的
8、输入输出设计一个自适应观测器,实时地给出对象未知参数和状态的估计,然后利用这些估计值再来设计自适应控制器,使对象输出能跟踪模型输出,或使其某一性能指标最优。2 采用受控对象输入输出构成自适应规律的设计方法采用受控对象输入输出构成自适应规律的设计方法 系统结构如下页图系统结构如下页图4中所示。中所示。r KmN(s)D(s)KpN(s)D(s)Kc 自适应机构 y ym e+-图 4 增益可调的参考模型自适应 控制系统 设计任务:设计可调增益Kc的自适应规律,使得控制系统能够适应被控对象时变或未知的开环增益Kp,且被控系统的输出动态特性与参考模型相一致.由图4,参考模型和参数可调被控系统的s域表
9、达式分别为其中D(s)和N(s)分别为如下已知的n阶的稳定首一多项式和n-1阶多项式)2()()()()()1()()()()(pcmsrssKKsYsrssKsYmDNDN1-01-0)()(niiiniiinsbssassNDq 下面基于李氏稳定性理论,设计比例调节器的增益Kc的自适应规律.首先定义如下广义误差 e=ym-y 因此,误差e的传递函数为其中增益误差K为K=Km-KcKp (4)q 由式(3)可知,广义误差e满足如下微分方程e(n)+an-1e(n-1)+.+a0=Kbn-1r(n-1)+.+b0r (5)3()()()()()-()()(pcssKssKKKsrsEmDNDN
10、选择状态变量:rxxrxxexnnn111121.,可得其状态方程实现:CxeBrKAxx1101.0nnaaaIA0.01.1.0.10.0102111111CbbbaaannnnnB其中 如下定义正定李氏函数 V=xTPx+K20 (7)式中P为所选定的正定矩阵,为大于零的实数.对函数V求导可得KKrKxxxKKxxxx22)(2VPBPAPAPP 参考模型总是稳定的,A为稳定阵,因此总可以选择正定矩阵Q,使得QPAPA 故(8)22VKKrKxQxxPB若令 即可推出 负定。于是可得:022KKrKxPBVrxKPB1-rxKKpcPB1BrKAxx 由上式可知,该自适应规律除包含输出误差e之外,还包含它的各阶微.对实际控制系统来说,带有微分因素的控制规律对系统的环境变化或扰动较敏感,容易引起系统的不稳定,而且实现纯微分环节也较困难.因此,该自适应规律在具体实现上有一定困难.为此,可在选择P矩阵时使P满足PB=CT=0 0T,0此时就有pcKerK,
 模型参考自适应控制
模型参考自适应控制