《自动控制理论_11结构不稳定及改进措施》由会员分享,可在线阅读,更多相关《自动控制理论_11结构不稳定及改进措施(34页珍藏版)》请在装配图网上搜索。
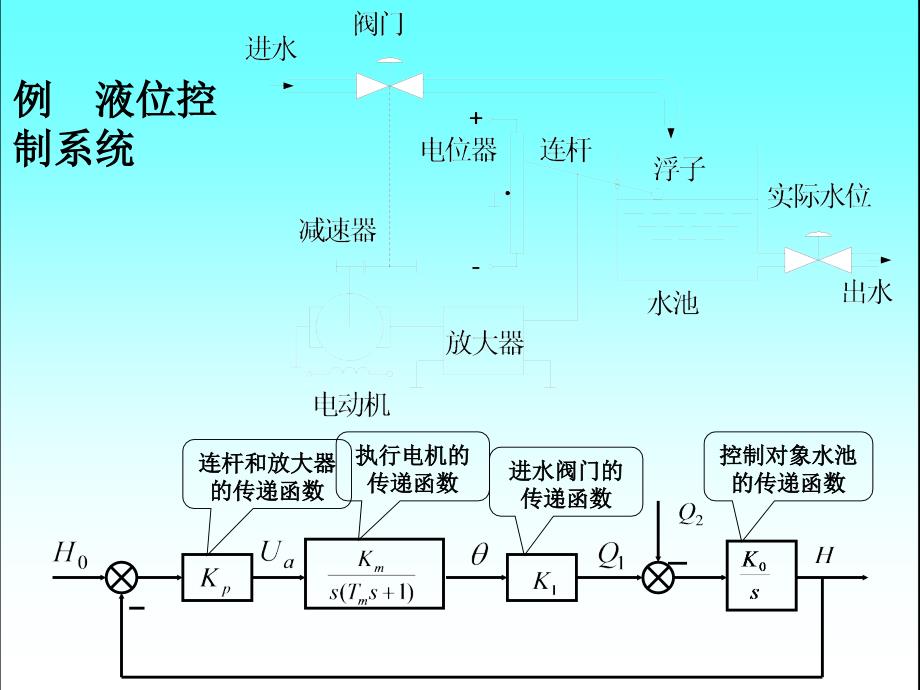
1、单击此处编辑母版标题样式,单击此处编辑母版文本样式,第二级,第三级,第四级,第五级,*,单击此处编辑母版标题样式,单击此处编辑母版文本样式,第二级,第三级,第四级,第五级,*,-,连杆和放大器的传递函数,执行电机的传递函数,进水阀门的传递函数,控制对象水池的传递函数,例 液位控制系统,-,系数缺项,显然不满足系统稳定的必要条件,无论怎么调整系统参数,都不能使系统稳定。,四.结构不稳定及改进措施,某些系统,仅仅靠调整参数仍无法稳定,称,结构不稳定系统,。,消除结构不稳定的措施有两种,改变积分性质,引入比例微分控制,补上特征方程中的缺项。,1.改变积分性质,用反馈 包围积分环节或者包围电动机的传递
2、函数,破坏其积分性质。,2.引入比例微分控制,在原系统的前向通路中引入比例微分控制,。,34 稳态误差分析及计算,一、误差与稳态误差,误差e(t)定义为:e(t)=r(t)-c(t)输出端误差,误差的另一种定义:,e(t)=r(t),-,b(t)输入端误差,稳态误差定义:,稳定系统误差的终值称为稳态误差。当时间t趋于无穷时,e(t)的极限存在,则稳态误差为,系统的稳态误差与系统的结构有关,还与输入信号的大小及形式有关。但是系统的稳定性只取决于系统的结构。,0,t,C(t),e,ss,R,(t),二、稳态误差的计算,若e(t)的拉普拉斯变换为E(s),且,注:,在计算系统误差的终值(稳态误差)时
3、,遇到的误差象函数,E(s),一般是s的有理分式函数,这时当且仅当,sE(s),的极点均在左半复平面,就可保证,成立。,存在,系统如图,若定义,e(t),=,r(t),-,b(t),则,E(s),=,R(s),-,B(s),称之为系统对输入信号的误差传递函数。,称 为,系统对干扰的误差传递函数。,例1 系统结构图如图所示,求 r(t)分别为A1(t),At,At,2,/2时系统的稳态误差。,解,例3、,系统结构如下图。当输入信号r(t)=1(t),干扰n(t)=1(t)时,求系统的稳态误差,解:判断稳定性。由于是一阶系统,所以只要参数 大于零,系统就稳定。,求E(s),根据结构图可以求出:,依
4、题意:R(s)=N(s)=1/s,则,应用终值定理得稳态误差,三.,输入信号作用下的稳态误差与系统结构参数的关系,将,G(s)H(s),写成典型环节串联形式:,当sE(s)的极点全部在s平面的左半平面时,可用终值定理求得,:,上式表明:系统的稳态误差除与输入有关外,还与系统的开环增益K和积分环节的个数有关,。,1.在阶跃信号作用下,要消除阶跃信号作用下的稳态误差,开环传递函数中至少要有一个积分环节。,2.在斜坡信号作用下,要消除斜坡信号作用下的稳态误差,开环传递函数中至少要有两个积分环节,。,3.等加速信号作用下,要消除等加速信号作用下的稳态误差,开环传递函数中至少要有三个积分环节。,由以上分
5、析可见,要消除系统在幂函数输入信号作用下的稳态误差,则应增加积分环节的数目;若只要求减小系统的稳态误差,则应提高开环增益,。,系统型别是针对系统的,开环传递,函数中积分环节的个数而言的。,=的系统称为型系统;,的系统称为型系统;,的系统称为,型系统。,注意事项,系统必须是稳定的,否则计算稳态误差无意义;,以上结论仅适用于输入信号作用下系统的稳态误差,不适用于干扰作用下系统的稳态误差;,上述公式中必须是系统的开环增益,也即开环传递函数中,各典型环节的常数项均为时的系数。,例4:系统结构如下图:若输入信号为,试求系统的稳态误差,。,解:判断稳定性。系统的闭环特征方程为,根据系统结构与稳态误差之间的
6、关系,可以直接求,从结构图看出,该系统为单位反馈且属型系统。因此,4、任意输入信号,利用动态误差系数,可以求解输入信号为任意时间函数时的系统稳态误差。,将闭环传函在s=0的邻域展开成泰勒级数,在零初始条件下(忽略t=0的脉冲),对上式进行拉氏反变换,得到误差信号e(t)的稳态分量,式中,解.由题意写出系统的误差传递函数,由上式求得动态误差系数,对输入信号求导,将数据代入得,四、干扰作用下的稳态误差,理想情况下,系统对于任意形式的干扰作用,其稳态误差应当为0,即对于干扰信号,N,(s)而言,理想的情况就是干扰引起的输出为0,希望系统的输出一点都不受扰动的影响。实际上这是不可能的。,G,1,(s)
7、,N,(s),R,(s),E,(s),-,C,(s),H,(s),G,2,(s),如图所示,如果输入信号,R,(s)=0,仅有干扰,N,(s)作用时,系统误差为:,干扰,作用下的稳态误差,实质上就是干扰引起的稳态输出的负值,它与开环传递函数,G,(s)=,G,1(s),G,2(s),H,(s),及干扰信号,N,(s)有关,还与干扰作用点的位置有关。,G,1,(s),N,(s),R,(s),E,(s),-,C,(s),H,(s),G,2,(s),用一待定的 来代替图中的 ,然后找出消除系统在干扰n(t)作用下的误差时,需具备的条件,。,以上分析表明,是误差信号到干扰作用点之间的传递函数,系统在时间幂函数干扰作用下的稳态误差 与干扰作用点到误差信号之间的积分环节数目和增益大小有关,,而与干扰作用点后面的积分环节数目和增益大小无关。,例6 系统结构图如图所示,当输入信号为单位斜坡函数时,求系统在输入信号作用下的稳态误差;调整K值能使稳态误差小于0.1吗?,-,解:只有稳定的系统计算稳态误差才有意义;所以先判稳,系统特征方程为,由劳斯判据知稳定的条件为:,由稳定的条件知:不能满足 的要求,作业,(11),
 自动控制理论_11结构不稳定及改进措施
自动控制理论_11结构不稳定及改进措施