《带增力机构的工业机器人手臂末端夹持器》由会员分享,可在线阅读,更多相关《带增力机构的工业机器人手臂末端夹持器(2页珍藏版)》请在装配图网上搜索。
1、
| 维普资讯 h ttp://
带增力机构的工业机器人手臂末端夹持器
神康民
内撑式连杆杠杆式夹持器
基于固定式无杆活塞缸驱动的增力机构
C
宀
先持器
\
固定罠无朴齐耶缸
龙杆培窮師
>
0
塢力机构
带壇力 机构的 工业机 器人手 程末端 夹持髀
机械制造44卷第505期
□盛小明
出阳3内捧式夹持爵
丄附I工业机器人
n外夹式连杆杠杆式夹持器
文章编号:I(XX) -4998(2006)09 - 0069 -02
垫片夹持器 外夾式夹持器
AAH4无杆活屋缸吒动搖址
0
*1
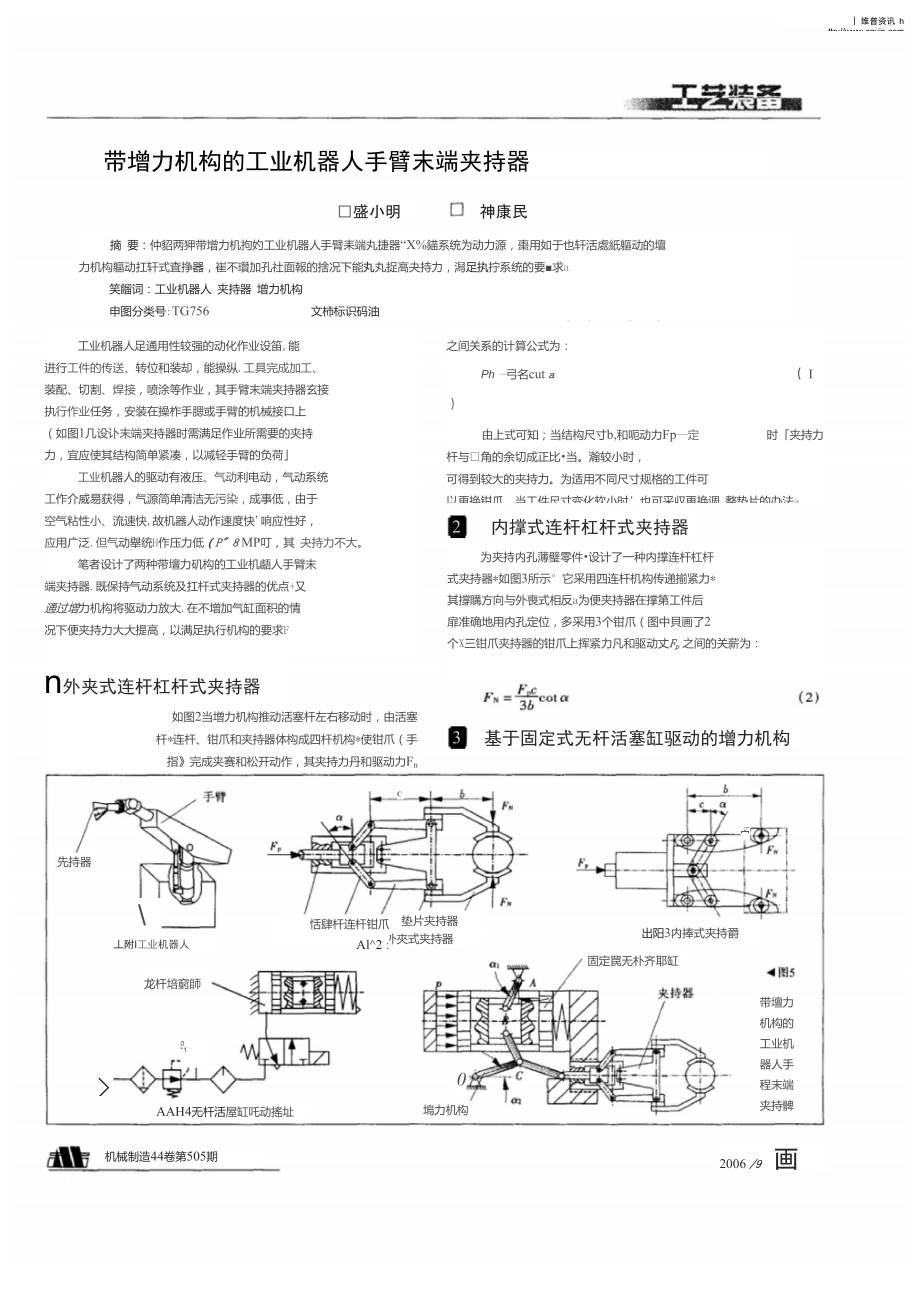
如图2当増力机构推动活塞杆左右移动时,由活塞 杆*连杆、
2、钳爪和夹持器体构成四杆机构*使钳爪(手 指》完成夹赛和松开动作,其夹持力丹和驱动力Fn
为夹持内孔薄璧零件•设计了一种内撑连杆杠杆 式夹持器*如图3所示它采用四连杆机构传递揃紧力* 其撐購方向与外喪式相反a为便夹持器在撑第工件后 扉准确地用内孔定位,多采用3个钳爪(图中貝画了2 个X三钳爪夹持器的钳爪上挥紧力凡和驱动丈Fp 之间的关薪为:
工业机器人足通用性较强的动化作业设笛,能 进行工件的传送、转位和装却,能操纵.工具完成加工、 装配、切割、焊接,喷涂等作业,其手臂末端夹持器玄接 执行作业任务,安装在操柞手腮或手臂的机械接口上 (如图1几设讣末端夹持器时需满足作业所需要的夹持 力,宜应使
3、其结构简单紧凑,以减轻手臂的负荷」
工业机器人的驱动有液压、气动利电动,气动系统 工作介威易获得,气源简单清洁无污染,成事低,由于 空气粘性小、流速快,故机器人动作速度快响应性好, 应用广泛.但气动舉统H作压力低(P" 8 MP叮,其 夬持力不大。
笔者设计了两种带壇力矶构的工业机齬人手臂末 端夹持器.既保持气动系统及扛杆式夹持器的优点+又 通过增力机构将驱动力放大.在不增加气缸面积的情 况下便夹持力大大提高,以满足执行机构的要求F
之间关系的计算公式为:
Ph -弓名cut a ( I )
由上式可知;当结构尺寸b,和呃动力Fp—定 时「夹持力 杆与□角的余切成正比•当。瀚较小时,
4、 可得到较大的夹持力。为适用不同尺寸规格的工件可 以更换钳爪,当工件尺寸变化软小时’也可采収更换调 整垫片的办法a
摘 要:仲貂两狎带增力机拘妁工业机器人手臂耒端丸捷器“X%錨系统为动力源,棗用如于也轩活處紙軀动的壇 力机构軀动扛轩式査挣器,崔不瓚加孔社面報的捨况下能丸丸捉高夬持力,潟足执拧系统的要■求a
笑餾词:工业机器人 夹持器 增力机构
申图分类号:TG756 文柿标识码油
恬肆杆连杆钳爪
Al^2 :
2006 /9 画
2
3
�
| 维普资讯 h ttp://
镁合金罩盖的结构设计
压铸浇注系统的设计
比阴市经委资助项U (编4 145}
⑶
机械
5、制造44卷第5肺期
文章握号:1000 - 49^8 (20(>6)09 - 1)070 "目
结论
作者单位;苏州天学机电工程学哓 岬政鋼码:江苏 215021 收稿日M : 2006年4月
用镂合金压铸件替代原钢沖压件(见图I、图2.在设 计中耍綜合考虑合金性能、压铸件的覺力状态、工作环 境、生产条件、经济性、可利用性氐及工艺制造方法等多 方面冈素。
用镁合金件替代钢结构件,顺血了汽车轻戢化的 蜜求•对镂资源的开发利用、节釣腿源、减少环境污染 等右垂耍意义「横合金具育较髙的振动衰减垂数,其压 铸件具有消振性、限尼性好的特点。镂合金压铸制作的 发动机罩盖”征减轻自敢的基础上同时具冇
6、优良的吸振 性能,可大大降低汽车发动机蠅声,提馬驾驶舒适度。
铁合金压椅工艺涉及流休动力学、热传导、觀性变 形等-系列复杂过程*准确地鋼定各工艺参数是很闲 难的⑴,而工艺参数中对压铸镁合金力学性能影响的 主次顺序为浇注温度、压射速度和铸型温度T滦题主鉴 针对犠合金汽车发动机罩盖模具温度场进行研究+通 过计算机樓拟间.建立压铸过程中模具的温度场.対合 理选样和优化丁艺参数•确定合埋压铸工艺•节宵人 力、物力、骑金右着直耍意义-
摘 要:骨对犹阳申华娇车发动扰罩盖,设计了钱合全压铸章盖替代燎钢冲压篩构罩盖■通过对罩盖压铸充盘过程 及压靖倨坏过程妁温度场梶拟’分析舟优忆压埼工艺事敦,通过压特斌验
7、,脸证了横栢业黒的正确、可愴口试件康际安眾后 发动机适杼良好,证明了压特歼理賤具设计合理可用*
关键词:优化设计 压力铸進 温蛊埼模拟 充型过程
中囲曲类号:TC249 支獻标识码:A
|2j] 2006/9
□唐春龙 口于宝义
电盖壁厚不均匀、有较复杂的曲面曲形口确崔合适 的浇注系统对成形至关西墓。
在浇注系统的设计过程屮+如图3所示的压铸浇注 系统三维实体模型即遵循了以下4个师则设计的:①績 合金熔怵能平袪地进入铸型,不受压型利型芯的阳为; ②保证镁合金熔休能把空气从報孵中排出T净;③避 免同部过热产生:④使于从诗件上去除冒口〜
镁台虽注车友动tn置盖的结絢设计与工艺or n
8、r
以气动聚统为动力源,可以梗机器人动作速度快, 响应性好,采用荃于无杆活塞紙驱动的增力机构■既能 保证机器人手骨末端杠杆式夹持器摩擦力小、活动灵 活、结构简单、成本低的恃点「又能在不玮加气缸面积 的情况下,大大挺高夹持力•滅轻了手瞥的负荷,礴足 执杆系统的要求口
参考文献
1盛小明,钟康民,垂于周定式无抒活塞缸岖动灼地力夹紧机 构[J ] •机械制造+1005 (10):71 -72.
2罗善明,曲柄增力机构的模拟没计[J1-机械科学与捷术.
2002(4)! 413 -415,436, A
(编辑功底)
固定式无杆活塞缸的丸动系统如图4+该缸为单作 用气缸’反向靠禅簧力作用,
9、由两佼三適电磁阀实现换 向p
无杆活曜缸的特点是在其活塞径向装有一过渡滑 块,册块两端对称地较接两較杆,活寒在压力作用时左 右运动’曙块则上下層动.结构如圉爲当系统夹紧时, 较点”将绕/!点作圆周运动.而楷块上下运动可增加 一个自由度‘补偿 対点上下位移,替代整个咒缸体的 摆功,結构賦凑.刚性好c
整个系统的理论输出力几计算为:
凡=
t6t^na]tariXi
式中D为无杆活塞缸活塞的直径甘为气动系统 压力。当缈和阳较小时,可得到足够大的输出力F护 具体工作原理及力学计算见参考文献口人杜杆式夹持 器在使用该增力机构后,能显著降低系统压力,减小气 缸直径,在得到足觸夹持.力的同时使机械手结构得到 简化•空得更加灵巧■从而降低设备成本.降低功耗。
2
 带增力机构的工业机器人手臂末端夹持器
带增力机构的工业机器人手臂末端夹持器