《自动控制设计自动控制原理课程设计学术参考》由会员分享,可在线阅读,更多相关《自动控制设计自动控制原理课程设计学术参考(13页珍藏版)》请在装配图网上搜索。
1、
自动控制原理课程设计
本课程设计的目的着重于自动控制基本原理与设计方法的综合实际应用。主要内容包括:古典自动控制理论(PID)设计、现代控制理论状态观测器的设计、自动控制MATLAB仿真。通过本课程设计的实践,掌握自动控制理论工程设计的基本方法和工具。
1 内容
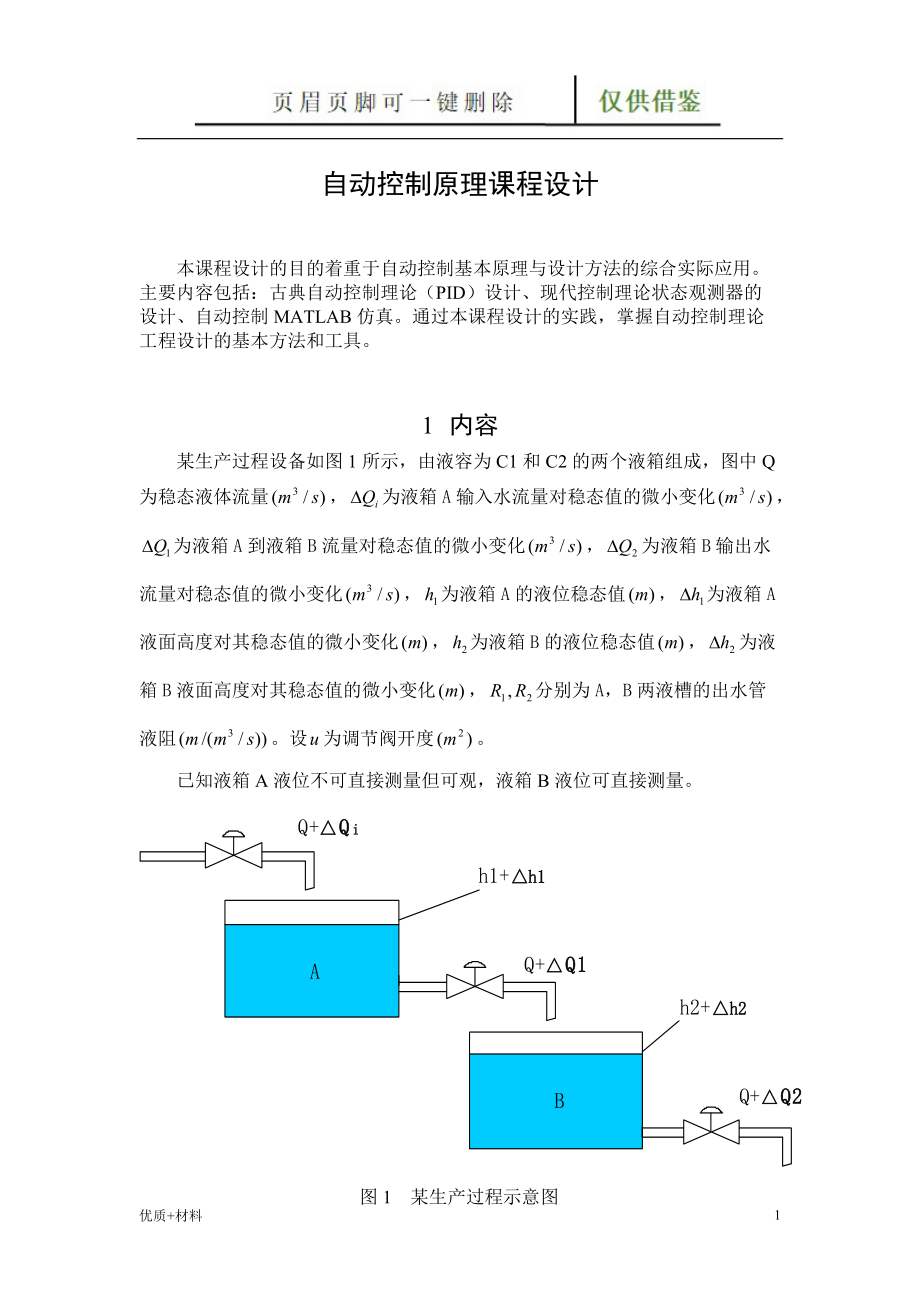
某生产过程设备如图1所示,由液容为C1和C2的两个液箱组成,图中Q为稳态液体流量,为液箱A输入水流量对稳态值的微小变化,为液箱A到液箱B流量对稳态值的微小变化,为液箱B输出水流量对稳态值的微小变化,为液箱A的液位稳态值,为液箱A液面高度对其稳态值的微小变化,为液箱B的液位稳态值,为液箱B液面高度对其稳态值的微小变化,分别为A
2、,B两液槽的出水管液阻。设为调节阀开度。
已知液箱A液位不可直接测量但可观,液箱B液位可直接测量。
图1 某生产过程示意图
要求
1. 建立上述系统的数学模型;
2. 对模型特性进行分析,时域指标计算,绘出bode,乃示图,阶跃反应曲线
3. 对B容器的液位分别设计:P,PI,PD,PID控制器进行控制;
4. 对原系统进行极点配置,将极点配置在-1+j和-1-j;(极点可以不一样)
5. 设计一观测器,对液箱A的液位进行观测(此处可以不带极点配置);
6. 如果要实现液位h2的控制,可采用什么方法,怎么更加有效?试之。
用MATLAB对上述设计分别进行仿真。
(
3、提示:流量Q=液位h/液阻R,液箱的液容为液箱的横断面积,液阻R=液面差变化/流量变化。)
2 双容液位对象的数学模型的建立及MATLAB仿真过程一、对系统数学建模
如图一所示,被控参数的动态方程可由下面几个关系式导出:
液箱A:
液箱B:
消去中间变量,可得:
式中,——两液槽的容量系数
——两液槽的出水端阻力
——第一个容积的时间常数
——第二个容积的时间常数
_双容对象的放大系数
其传递函数为:
二.对模型特性进行分析,绘出bode,奈氏图,阶跃反应曲线
当输入为阶跃响应时的Matlab仿真:
令T1=T2=6;K=1
单位阶跃
4、响应的MATLAB程序:
num1=[1];den1=[36 12 1];
G1=tf(num1,den1);
figure(1);
step(G1);
xlabel(时间(sec));ylabel(输出响应);title(二阶系统单位阶跃响应);
step(G1,100);
运行结果如下:
阶跃反应曲线:
图1
c(∞)=1; c(tp)=1; tp=45.5s; td=10s; ts=45.5s;
最大超调量:δ(tp)= [c(tp)- c(∞)]/ c(∞)*100%=0%
稳态误差分析:
开环传递函数,稳态误差;
用MATLAB绘制的奈氏图如下图2所
5、示,其程序如下:
nyquist([1],conv([6 1],[6 1]))
图2
在工程实践中,一般希望正相角裕度r为45~60,增益裕度KdB,即K。当系统为单位负反馈时的Bode图:用MATLAB绘制的奈氏图如下图3所示,其程序如下:
sys=tf([1],conv([6 1],[6 1]));margin(sys);figure
图3
三:对B容器的液位分别设计:P,PI,PD,PID控制器进行控制
PID控制的原理和特点
(1)P控制:取P=9; I=0; D=0;
(2)PI控制:P=6,I=0.4,D=0;
(3)PD控制:P=9
6、,I=0,D=5;
(4)PID控制:P=5,I=0.3,D=4;
四.系统极点配置在-1+j; -1-j
根据传递函数
得微分方程
令
得状态方程
输出:
极点配置:
令K=1; T1=T2=2;
用MATLAB确定状态反馈矩阵K,使得系统闭环极点配置在(-1+j,-1-j),程序如下:A=[0 1;-0.25 -1];
B=[0;1];
P=[-1+j;-1-j];
K=place(A,B,P)
运行结果为
K =
1.7500 1.0000
仿真:
仿真图
五.设计一观测器,对液箱A的液位进行
7、观测
l 建立状态观测器:
根据传递函数
得微分方程
令
得状态方程
输出:
全维观测器的建立:
令,得
期望特征式:
对比1式和2式,得
得
所以全维状态观测器得方程是
本实验中,需观测的状态为水箱A溶液的液位,
建立数学模型
R1=R2=1; c1=c2=1;
令状态观测器的极点为(-6-j,-6+j)
设计此给定系统状态观测器的MATLAB程序如下
A=[-1 0;1 -1];
B=[1 0];
C=[1 1];
A1=A;B1=C;C1=B;
P=[-6-j -6+j];
K=acker(A1,B1,P);
G=K
运行结果为
G =
26
-16
仿真:
仿真图:
六、如果要实现液位h2的控制,可采用什么方法,怎么更加有效?试之
前馈反馈控制方法
这种调节系统中要直接测量干扰量的变化,液位h2作为反馈量,流量Q作为前馈量,可以克服流量Q干扰量的偏差,同时可以加快控制的速度,使调节更加及时有效。
13
优质+材料
 自动控制设计自动控制原理课程设计学术参考
自动控制设计自动控制原理课程设计学术参考