《大型数字式六自由度运动平台的开发》由会员分享,可在线阅读,更多相关《大型数字式六自由度运动平台的开发(3页珍藏版)》请在装配图网上搜索。
1、大型数字式六自由度运动平台的开发
一、概述
六自由度运动平台(用于加工业被称为“虚拟轴机床”),由于有极为广阔的应用前景,近几年,引起了国外科研、院校广泛的研究兴趣。六自由度运动平台是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只油缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态,可广泛应用到各种训练模拟器中,如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶员模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域中。在加工业可制成六轴联动机床、机器人等。由于六自由度运动
2、平台的研制,涉及机械、液压、电器、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等等一系列高科技领域,因而六自由度运动平台的研制变成了高等院校、研究院所在液压和控制领域水平的标志性象征。国外某大型液压公司的总部大厅里,向客人展示水平的第一个标志就是六自由度运动平台,笔者认为,六自由度运动平台是液压及控制技术领域的皇冠级产品,掌握了它,在液压和控制领域基本上就没有了难题。以下介绍它的开发过程。
二、传统的伺服液压控制六自由度运动平台
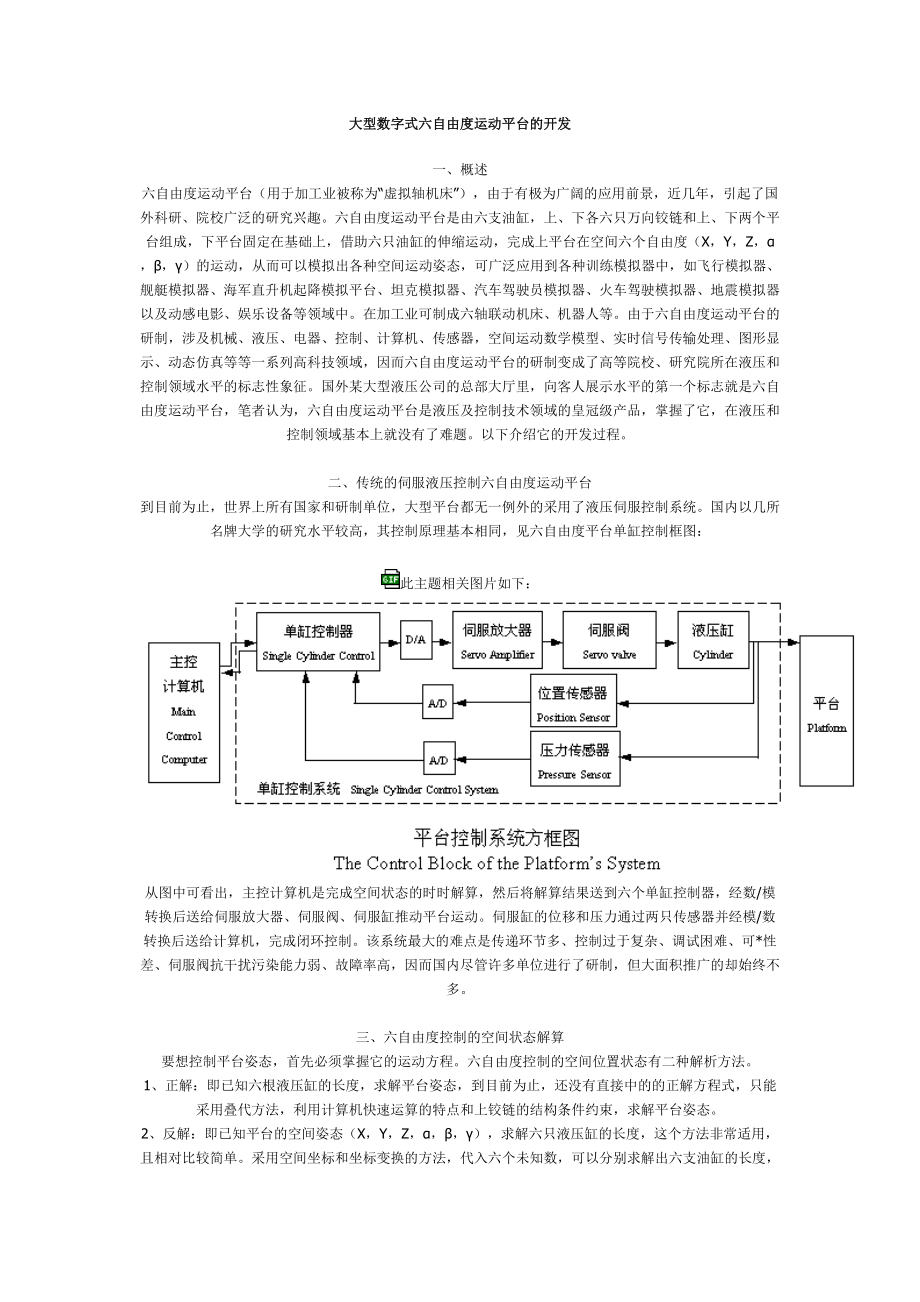
到目前为止,世界上所有国家和研制单位,大型平台都无一例外的采用了液压伺服控制系统。国内以几所名牌大学的研究水平较高,其控制原理
3、基本相同,见六自由度平台单缸控制框图:
此主题相关图片如下:
从图中可看出,主控计算机是完成空间状态的时时解算,然后将解算结果送到六个单缸控制器,经数/模转换后送给伺服放大器、伺服阀、伺服缸推动平台运动。伺服缸的位移和压力通过两只传感器并经模/数转换后送给计算机,完成闭环控制。该系统最大的难点是传递环节多、控制过于复杂、调试困难、可*性差、伺服阀抗干扰污染能力弱、故障率高,因而国内尽管许多单位进行了研制,但大面积推广的却始终不多。
三、六自由度控制的空间状态解算
要想控制平台姿态,首先必须掌握它的运动方程。六自由度控制的空间位置状态有二种解析方法。
1、正解:即已知六根液
4、压缸的长度,求解平台姿态,到目前为止,还没有直接中的的正解方程式,只能采用叠代方法,利用计算机快速运算的特点和上铰链的结构条件约束,求解平台姿态。
2、反解:即已知平台的空间姿态(X,Y,Z,α,β,γ),求解六只液压缸的长度,这个方法非常适用,且相对比较简单。采用空间坐标和坐标变换的方法,代入六个未知数,可以分别求解出六支油缸的长度,虽然计算繁杂,但利用计算机的快速运算特性,可以实时跟踪姿态模拟操作器发出的姿态信号,快速计算出每只油缸的长度,从而实时跟踪对平台的操纵要求,达到快速响应的目的。
四、六自由度的速度协联控制
由前面可知,当给定空间状后,可以分别算出六只缸的不同长度,为了
5、让平台上的油缸在同一时间运动到新的位置,六只缸的运动速度是不相同的,这个问题的解决有两种方法,一种是采购标准的协联控制器,该控制器需将油缸的运动长度数值送入,控制器能按所要求的时间,自动分配六只缸的运动速度,同时到达终点。第二种方法是自己编制运动速度方程,采用长度的最小公倍数方法分配速度,也可达到同样目的。
五、六自由度平台的全数字控制
为了攻克六自由度运动平台的应用难关,北京亿美博科技有限公司采用了自己开发的性能先进、操作可*的新型数字(液压)缸(已纳入“十五”攻关和国家重点新产品项目),作为六只控制缸。该数字缸取消了传统控制中的伺服阀、传感器、A/D转换和D/A转换等诸多环节,它是
6、将传感器、数字阀等全部做到油缸内部,形成自动位置反馈和速度反馈。数字缸可以直接接受计算机发出的数字脉冲信号进行可*的工作。脉冲频率代表数字缸运动速度,脉冲总数代表数字缸运动行程。亿美博公司与我国军事院校合作,联合开发了载重量3吨和8吨的数字式六自由度运动平台,它的控制框图如下:
此主题相关图片如下:
从上图与伺服系统的框图比较可知,控制原理大大简化,不但系统响应速度加快,而且故障率也大大降低,可*性得以大为增加。整个六自由度运动平台无任何液压控制元件和传感器,系统构成十分清爽。实际情况如右侧照片所示。平台运动的录像可在http://www.china-
运动技术指标:
自由度
7、 位移(联合运动) 位移(单自由度) 速度 加速度
俯仰 30 deg 25deg 20 deg/s 350 deg/s2
滚转 35 deg 30deg 24 deg/s 140 deg/s2
升降 0.60 m 0.60m 0.40 m/s + 1.0G
纵向摆动 0.60 m 0.40m 0.36 m/s 0.6G
液压系统指标:
系统压力:14MPa
系统最大供油量:650L/分
数字缸:
直径:110mm/75mm;
行程:1200mm
液压系统图:
此主题相关图片如下:
 大型数字式六自由度运动平台的开发
大型数字式六自由度运动平台的开发