 自动控制原理第2章习题解
自动控制原理第2章习题解

《自动控制原理第2章习题解》由会员分享,可在线阅读,更多相关《自动控制原理第2章习题解(11页珍藏版)》请在装配图网上搜索。
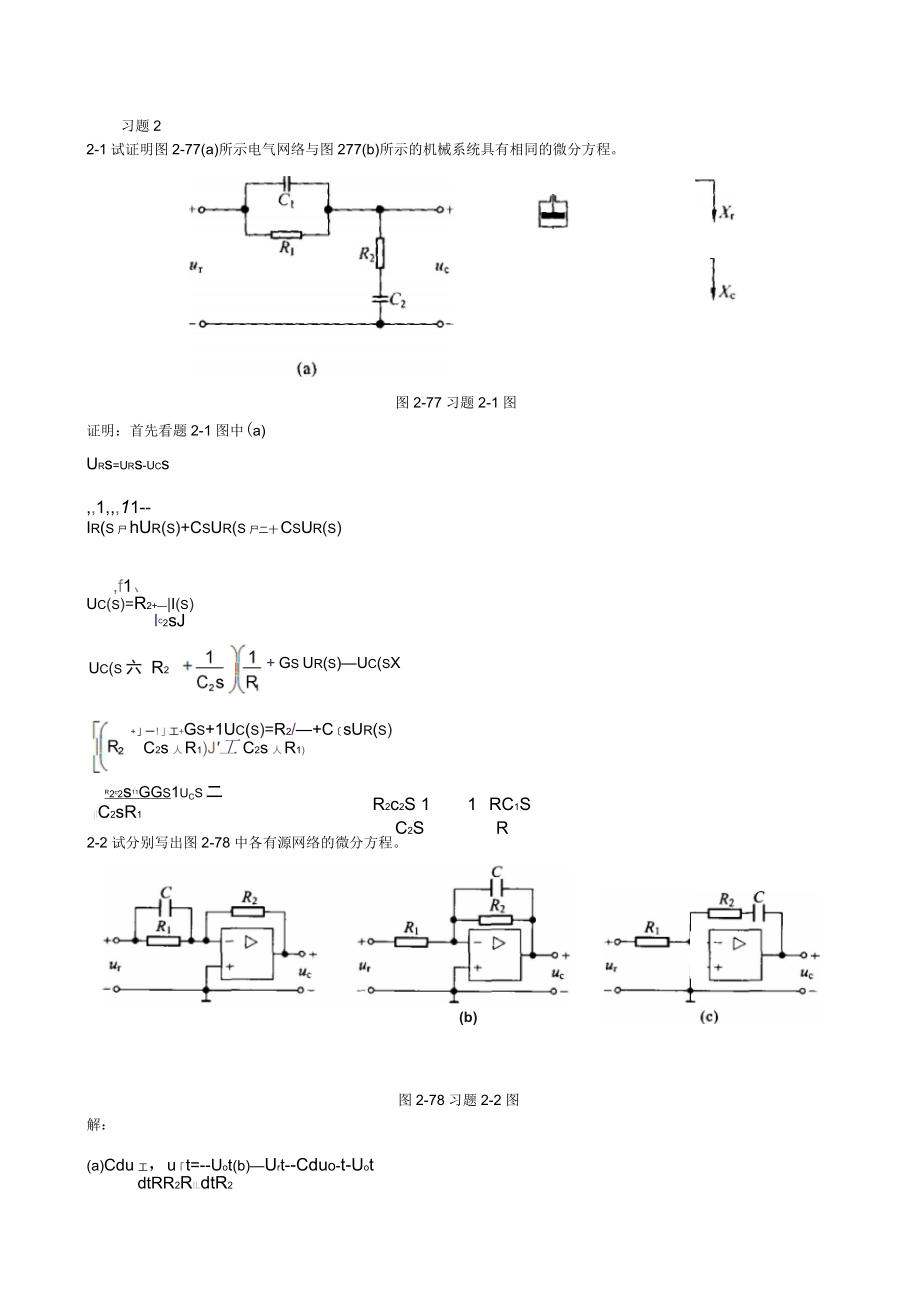
1、习题2 2-1试证明图2-77(a)所示电气网络与图277(b)所示的机械系统具有相同的微分方程。 d. 图2-77习题2-1图 证明:首先看题2-1图中(a) Urs=Urs-Ucs ,,1,,,11-- Ir(s尸hUr(s)+CsUr(s尸二十CsUr(s) ,f1、 Uc(s)=R2+—|I(s) IC2sJ Uc(s六 R2 + Gs Ur(s)—Uc(sX R2c2S 1 1 RC1S C2S R +」一!」工+Gs+1Uc(s)=R2/—+C〔sUr(s) C2s人R1)J'工C2s人R1) R2c2s11GGs1
2、ucs二 |lC2sR1 2-2试分别写出图2-78中各有源网络的微分方程。 (b) 图2-78习题2-2图 解: (a)Cdu工,u「t=--Uot(b)—Urt--Cduo-t-Uot dtRR2RILdtR2 1,ccdUct, ⑹-Urt=-R2CcUct R1_dt 2-3某弹簧的力一位移特性曲线如图2-79所示。在仅存在小扰动的情况下,当工作点分别为xo=-1.2,0, 2.5时,试求弹簧在工作点附近的弹性系数。 解:由题中强调“仅存在小扰动”可知,这是一道非线性曲线线性化处理的问题。于是有
3、,在Xo=-1.2,0, 1) df dX x=12 2.5这三个点处对弹簧特性曲线做切线,切线的导数或斜率分别为: 40一一40二里.35.56 0.75--1.52.25 2) df dx x旦 40-0 2 -0 二20 3) df dx 35 -20 15 人 x^.5 - 3-0.5 -2.5 一 2-4图2-80是一个转速控制系统,其中电压u为输入量,负载转速④为输出量。试写出该系统输入输出间 的微分方程和传递函数。 位移髭工/cm 图2-80 习题2-4图 图249 习题2-3图 解:根据系统传动机构图可列动态如下:
4、 di t Ri t L Ke ' =Ur t dt Tem = Kt i d ■ ""KTf 将方程(3)整理后得: i」TL皿 Kt Kt出 将方程(4)代入方程(1)后得: R RJ d Tl Kt Kt dt LdlL LJ d2 ■ 2 Kt dt Kt dt Ke:> =5 t (1) (2) (3) (4) (5) 将方程(5)整理后得: LJ d% KT -dt2- RJ d . + Kt dt R -ur t TL - KT L dTL 《"dT (6) 2-5系统的微分方程组如下 父]
5、a)==(力一£a),+k 丁3(工)=代以(1),』([)=#3(1)一工m(E)—K5£(/) da?5(z)/dc(t) 得「二K百⑴,Ky3=丁也卢,Mf) 口edt 式中,r, K-, K2, Ko, Kn, Kj , T均为常数。试建立系统 r⑴对c⑴的结构图,并求系统传递函数 C(s) / R(s)。 解:首先画系统结构图,根据动态方程有: Xi(s). 然后,根据梅逊公式得: sKKK3K4K2K3K4S. csS12sTS1STS1 R(s)1十(无十KKK3K4+K3+K3K4K5s(Ts+1)+K2K3K46十Ki)十K4Ts+I%K3K4K5
6、 12sTs1ssTs1sTs1sTs1sTs1sTs1 Cs=K2K3K4sKi Rs-Ts21K2K3K4.K3TsKiK2K3K4K3K3K4K5 26图2-8l是一个模拟调节器的电路示意图。 76GRs 图2-81习题2-6图 ① 写出输入Ui,与输出Uo之间的微分方程; ② 建立该调节器的结构图; ③ 求传递函数U0(S)/Ur(S)。 解:根据电路分析需要,引入中间变量Voi⑴,Vo2(t),然后,由电路图可知: UisUos1= RiRi Uois R3 =-C2sUo2s (1) (2) R5 Uos一詈Uo2s R4 (3) 采用代
7、入法,将上述3个方程联立求解得: R2R5 RR3R4c2sR2Cisi UisUos1 Uos= R2R5 RRR4c2sRCisiRzRCis Uis Uos R2R5 UisRR3R4c2R2cls2RR3R4c2sR2R5clsRiR3R4C2Ci s 2-7某机械系统如图2-82所示。质量为m、半径为R的均质 圆筒与弹簧和阻尼器相连的斜面上滚动(无滑动),求出其运动方程。 解:首先,对圆辐进行受力分析;根据分析结果可知: mg 「RiRsRCz+RzRCi .RiRR^RzCi) 图282习题"『图
8、 dd2乜 mgsin二一Kx1-B——二m-2- dtdt2 d2x1 噜Kx1 =mgsin 二 回路通道传递函数 Li: L1 = -G1 (s G2(sH2(s ); L2 =-G2(sH1(s) d 2xi m——2- dt dx B- Kx1 二 mg 图2Y3 习即2d图 2 9试简化图2-84中各系统结构图,并求传递函数 c(s)/R(s)。 2
9、8图2-83是一种地震仪的原理图。地震仪的壳体固定在地基上,重锤M由弹簧K支撑。当地基上下震动时,壳体随之震动,但是由于惯性作用,重锤的运动幅度很小,这样它与壳体之间的相对运动幅度就近似等于地震的幅度,而由指针指示出来。活塞B提供的阻尼力正比于运动的速度,以便地震停止后指针能 及时停止震动。 ①写出以指针位移y为输出量的微分方程;②核对方程的量纲。 解:首先,对重锤进行受力分析;根据分析结果可知: ,,2 dydy mg-Ky-B—=m—£出dt2 图2-84习题2-9图 解:(a),根据梅逊公式得: 前向通道传递函数Pk:P=G1(sG2(s);P2=G3(sG2(s)
10、特征方程△:△.=1一<Li=1•G1sG2sH2s•G2sH1s 由于回路传递函数都与前向通路相“接触”,所以。余子式:△I=42=1 系统传递函数为: s_Cj_G1sG2sG2sG3s 一Rs-1G1sG2sH2sG2sH1s (b),根据梅逊公式得: 前向通道传递函数Pk:P=G1(sG2(s); 回路通道传递函数Li:L1=W1(sH1(s);L2=—H1(sH2(s) 特征方程△:::=1Li=1・G1sH1s•H1sH2s 由于回路传递函数L2与前向通路相“不接触”,所以。余子式:A1=1+H1(sH2(s) 系统传递函数为: C s Rs GKsM+H
11、1(sH2(s》G 1G1sH1sH〔sH2s2s (c),根据梅逊公式得: 前向通道传递函数Pk:P=G1(sG2(sG3(sG4(s); 回路通道传递函数Li:L1=G1(sG2(sG3(sG4(sH1(s); L2=-GsG2sG3sH2s L3=-G2sG3sH3s L4=-G3sG4sH4s 特征方程△: :=1-'Li=1-G1sG2sG3sG,sH1sG1sG?sG3sH2sG2sG3sH3sG3sG4sH4s 由于回路传递函数都与前向通路相“接触”,所以。余子式:4=1 系统传递函数为: ,CsG1sG2sG3sG4s s-Is== Rs1-G1sG
12、2sG3sG4sH1sG1sG2sG3sH2sGzsG3sH3sG3sG,sH4s 2-10试用梅逊公式求解习题2-9所示系统的传递函数C(s)/R(s)。 2-11系统的结构如图2-85所示。 ①求传递函数C1(s)/Ri(s),C1(s)/R2(s),C2(s)/Ri(s),C2(s)R2(s), ② 求传递函数阵 G(s)C(s尸G (s)R(s),其中 〜、展」a\网s)lG(S也s)}R⑺飞闯 解:Ci(s)/R(s),根据梅逊公式得: 前向通道传递函数Pk: P1=GiSG2SG3s P2=Gi(sG7(sG5(sG8(sG3(s); 图2-85 习题2-11
13、图 回路通道传递函数ELi:L1=-G3(sG3(s); L2=G7SG5sG8s L3=-G5sH2s 相互“不接触”回路ELiLj: L1L2=—G3sG3sG7sG5sG8s L1L3=G3sG3sG5sH2s 特征方程△: =1「Li八Li」 =1,G3sG3s-G7sG5sG8s,G5sH2s,G3sG3sG7sG5sG8s-G3sG3s-G5sH2s 由于回路传递函数都与前向通路相“接触”,所以。余子式:△1=1 系统传递函数为: C〔s= 2-12试求图2-86所示结构图的传递函数C(s)/R(s)。 解:C1(s)/R(s),根据梅逊公式得: 前向
14、通道传递函数Pk: P—G1(s);P2=Gz(s);P=—G1(sG2(s); 图2-86 习题2 12图 R=QsG2(s); 特征方程△: △=1-%Li-jLj- =1GsG2s-3GsG2s 特征方程余子式4k:=:2=.%=.%=1 系统的传递函数为: :,s_Cs_GsQs-2GsG2s 1—Rs-1G1sG2s-3GlsG2s 回路通道传递函数 ELi:1=刀1位);L2 = -G2(s); L3=G1(sG2(s); L4 =G(sG2(s); L5 =G(sG2(s) 2-13已知系统结构如图2-87所示,试将其转换成信号流图,并求出c
15、⑸/R(s)。 图2-87习题2-13图 解:(a)根据梅逊公式得: Cs Rs1GsH1sG2sH2sGsH1sG2sH2s (b)根据梅逊公式得: ①(s)_Cs)G(sG2(s) ,「Rs-1G1sdsG2sH2s 2-14 (b) 系统的信号流图如图2-88所示,试求C(s)/R(s)。 图2-88习题2-14图 图2-89习题2-15图 解:(a)根据梅逊公式得: Cs Rs 2-15 某系统的信号流图如图 2-89所示,试计算传递函数 C2
16、(s)/R1(s)。若进一步希望实现 C2(s)与R[(s)解 2-16 已知系统结构图如图 2-90所示。 ①求传递函数 C(s)/R(s)和C(s) /N(s)。 ②若要消除干扰对输出的影响 (即C(s) /N(s)=0,问G0(s尸? 解:①由结构图可知 C(s)/R(s) 图2r90习题276图 0.5K 2 中s且_ss1_0.5K_0.5K Rso.0.5K12.5s2s10.5Ks2.5s2S33.5s2s0.5K I2~T~AA, ss1ss1iis1 (b)根据梅逊公式得: G1sG2s 1G1sdsG2sH2s K1K2K3 Cs_sTs
17、1_K1K2K3 Rs1,K1K2K3sTs1K1K2K3 sTs1 ②由结构图可知C(s)/N(s) G.K1K2K3K4K3 Cs_0ssTs1-Ts1_K1K2K3G0s-K4K3s Ns1,K1K2K3sTs1K1K2K3 sTs1 若使C(s)/N(s)=0,则意味着 K1K2K3G0s-K4K3s=0 最终求得G0(s): G0s=-K^-s K1K2 2-17考虑两个多项式p(s)=s2+2s+1,q(s)=s+1。用Matlab完成下列计算①p(s)q(s) ②G(沪悉x鬟x南; ③扩m 2-18考虑图2-91描述的反馈系统。 ①利用函数se
18、ries与cloop,计算闭环传递函数,并用printsys函 数显示结果; ②用step函数求取闭环系统的单位阶跃响应,并验证输出终值为 图%91 习题2T8图 2/5。 解:略 2-92所示,其中k=10. 8E+08, a=1和b=8是控制器参数, J=10。 图2-92 习题2-19图 图2-93 习题2-20图 2-19卫星单轴姿态控制系统的模型如图8E+08是卫星的转动惯量。 ①编制MatIab文本文件,计算其闭环传递函数口Ws)/Ms); ②当输人为Q(s)=10o的阶跃信号时,计算并做图显示阶跃响应; ③转动惯量-,的精确值通常是不可知的,而且会随
19、时间缓慢改变。当‘,减小到给定值的80%和50% 时,分别计算并比较卫星的阶跃响应。 2-20考虑图293所示的方框图。 ①用Matlab化简方框图,并计算系统的闭环传递函数; ②利用pzmap函数绘制闭环传递函数的零极点图; ③用roots函数计算闭环传递函数的零点和极点,并与②的结果比较。 (2)如图所示机械位移系统,求G(s)=Y(s)/F(s)。解:首先对质量为m的物体进行受力分析,得所受的合力为 ,2, FtFitF2t=m-y2- dt 其中,F《)=—ky(t);F2(t)=_f皿)dt 于是有 dytd2yt Ft-kyt-f『m『 整理得 2 m整f誓…Ft 解答完毕。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
