 弹性力学课件 应变状态理论 V2012.docx
弹性力学课件 应变状态理论 V2012.docx

《弹性力学课件 应变状态理论 V2012.docx》由会员分享,可在线阅读,更多相关《弹性力学课件 应变状态理论 V2012.docx(33页珍藏版)》请在装配图网上搜索。
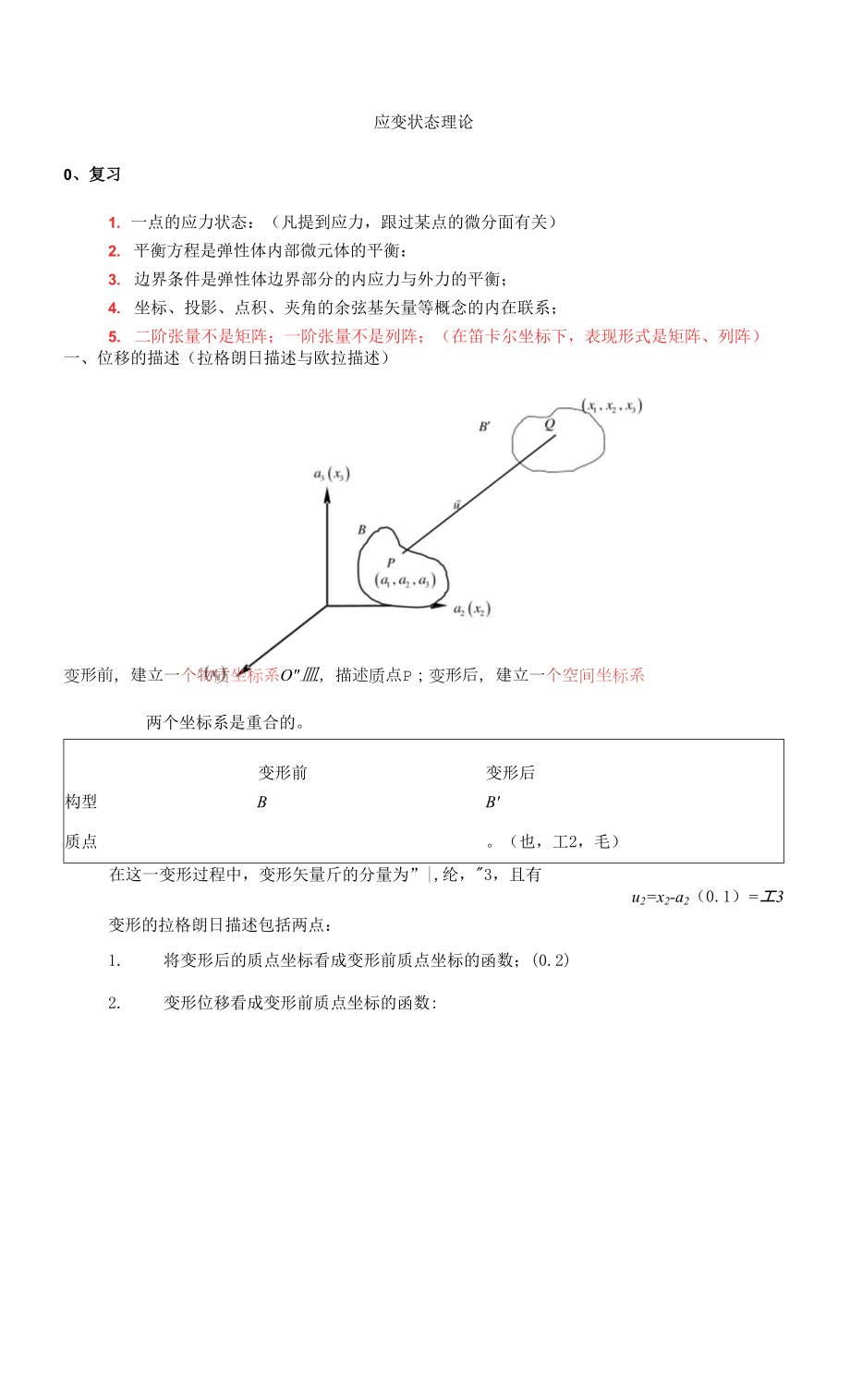
1、应变状态理论 0、复习 1. 一点的应力状态:(凡提到应力,跟过某点的微分面有关) 2. 平衡方程是弹性体内部微元体的平衡: 3. 边界条件是弹性体边界部分的内应力与外力的平衡; 4. 坐标、投影、点积、夹角的余弦基矢量等概念的内在联系; 5. 二阶张量不是矩阵;一阶张量不是列阵;(在笛卡尔坐标下,表现形式是矩阵、列阵)一、位移的描述(拉格朗日描述与欧拉描述) 变形前,建立一个物质坐标系O"皿,描述质点P;变形后,建立一个空间坐标系 两个坐标系是重合的。 变形前 变形后 构型 B B' 质点 。(也,工2,毛) 在这一变形过程中,变形矢量斤的
2、分量为”|,纶,"3,且有 u2=x2-a2(0.1)=工3 变形的拉格朗日描述包括两点: 1. 将变形后的质点坐标看成变形前质点坐标的函数;(0.2) 2. 变形位移看成变形前质点坐标的函数: %y=a、N时,只有形状改变,无转动;当axyayz时,有转动。但是只要a+avz不变,乙,就不变。换句话说:仅用剪应变, 乙,就不变。换句话说:仅用剪应变, 不能完全刻画变形,还要考虑转动的情况。 通过分析弹性体内无限邻近两点的位置变化,则可得出刚体的转动位移与纯变形位移之间的关系。刚体转动通过转动分量描述。 刚性转动位移的物理意义:如果弹性体内某点没有变形,则
3、无限邻近它的任意一点的位移由两部分组成,平动位移和转动位移。如果发生变形,位移中还包括纯变形位移。 1、刚体转动位移 应变可以描述一点的变形,即对微分平行六面体单元棱边的伸长以及棱边之间夹角的改变做出定义。但是这还不足以完全描述弹性体的变形,原因是应变分析仅仅讨论了棱边伸长和夹角变化,而没有考虑微分单元体位置的改变,即单元体的刚体转动。 通过分析弹性体内无限邻近两点的位置变化,则可得出刚体的转动位移与纯变形位移之间的关系。 设P点无限邻近。点,P点及其附近区域绕0作刚性转动,转过微小角度。 设转动矢量为c,OP之间的距离矢量为p,如图所示。 co=o)xk p=xi+yj-\-
4、zk引入哈密顿算子(那勃勒算子) dxdydz2、转动位移分量 设P点的位移矢量为U,有U-ui+uj+uk 由于位移矢量可以表示为U*xp,xU xU 并且,万是。的旋度的Ld>=-V22 dxdz) OUcvv dzdx dvou fdwdv 3dy) 13、 1 0=~~2 注意:这里的系数与吴家龙教材P35不一致,但是不影响其正确性。(都是正确的!)妊,袱,好为转动分量,是坐标的函数,表示了弹性体内微分单元体的刚性转动。 2、纯变形位移与转动位移 设M点的坐标为(x,y,z),位移(〃,y,vr)o与M点邻近的N点,坐标为(x+dr,y+dy,z+
5、dz),位移为(w+dw,v+dv,hh-cIhOo 则枷两点的相对位移为(d/Gdv,dvv)o因为位移为坐标的函数,所以 -duttdut.du.dw=——dx+—dy+——dzdxdydz =准+丝W+J竺+丝)也二(即- dx2dxdy2dxdz2dx 同理可得 dv=+—/^dx+—/xdz-^dz+ 22dw=szdz+—y}Sdx+—y)Bdy-a)ydx+必曲 22 以上位移增量公式中,前三项为产生变形的纯变形位移,后两项是某点邻近区域的材料绕该点像刚体一样转动的刚性转动位移。 刚性转动位移的物理意义为,如果弹性体中某点及邻近区域没有变形,则与某点无限邻近这一
6、点的位移,根据刚体动力学可知,是由两部分组成。分别是随这点的平动位移和绕这点的转动位移。对于弹性体中某一点,一般还要发生变形,因此位移中还包括纯变形位移。 3、位移的分解 总得来讲,与M点无限邻近的N点的位移由三部分组成的: 1、随同M点作平动位移。 2、绕M点作刚性转动在N点产生的位移。 3、由于M点及其邻近区域的变形在N点引起的位移。 转动分量0“少”口,对于微分单元体,描述的是刚性转动,但其对于整个弹性体来讲,仍属于变形的一部分。三个转动分量和六个应变分量合在一起,不仅确定了微分单元体形状的变化,而且确定了方位的变化。 位移增量公式如果使用矩阵形式表示,可得血 d
7、vdw 显然,位移的增量是由两部分组成的,一部分是转动分量引起的刚体转动位移,另一部分是应变分量引起的变形位移增量。 五、转轴时应变分量的变换(符合张量的变换规律)吴家龙教材P37学习思路: 复习:什么是一点的应力状态?(与点和微分面有关) 与应力状态分析相同,一点的应变分量在不同坐标系下的描述是不相同的,因此讨论应变状态,就必须建立坐标变换,就是坐标转动时的应变分量变换关系。 本节通过新坐标系与旧坐标系之间的位移变换关系式,根据几何方程,通过复合函数的微分,就可以得到应变分量的转轴公式。 转轴公式表明应变张量也是二阶对称张量。 根据转轴公式,一点的六个独立的应变分量一旦确定,则
8、任意坐标系下的应变分量均可确定,即应变状态完全确定。 应变状态分析表明:坐标变换后各个应变分量均发生改变,但是作为一个整体,一点的应变状态是不会改变的。 1、坐标变换 本节将讨论不同坐标系下一点的应变分量的关系。与坐标转轴时的应力分量的变换一样,我们将建立应变分量转轴的变换公式,即已知矿:/在旧坐标系中的分量,求其在新坐标系中的各分量幻7。 根据几何方程,坐标平动将不会影响应变分量。因此只需坐标转动时的应变分量变换关系,设新坐标系QxVz,是旧坐标系O.^z经过转动得到的,如图所 新旧坐标轴之间的夹角的方向余弦为 xyzx'Zj勺y'以2 z'l3nz 设变形前的A/点,变形后移
9、至点,设其位移矢量MM*=t/,则S二必+即+川丘二必,+v'J'+w'k' 2、应变分量坐标转轴公式 所以,新坐标系的位移分量为 /=5■/r=td1+g] v'C,z')=S•
10、 3二辨2勺+2代3,+2时疙+(饥+顷1)4+("2+用2而乙+(部2+以)心%=2/加+2吗处弓+2〃必3乌+但沈3+顷2)匕+(5+演3%)乙+(源3+以成皿,=+2叫也由+2奶电+(顷1+饥3)均+(5+叫角),缪+W1+部3成3、应变张量 如果以nij(/,>1,2,3)表示新旧坐标系之间的夹角的方向余弦,并注意到应变张量表达式,则上述应变分量变换公式可以写作因此,如果将应变分量写作下列形式 1 i 2r^ 2rx 1 弓 2r>e 1 勺,12公。21&勺3 %与2#33. 则应变分量满足张量变换关系。 与应力张量相同,
11、应变张量也是二阶对称张量。 由公式可知,一点的六个独立的应变分量一旦确定,则任意坐标系下的应变分量均可确定,即一点的应变状态就完全确定了。不难理解,坐标变换后各应变分量均发生改变,但它们作为一个整体,所描述的一点的应变状态是不会改变的。 六、主应变应变张量不变量学习思路: 应变状态分析需要确定一点的最大正应变及其方位,就是确定主应变和主平Elo 对于任意一点,至少有三个垂直方向,在该方向仅有正应变而切应变为零。具有该性质的方向,称为应变主轴或应变主方向,该方向的正应变称为主应变。 本节根据位移增量与应变分量以及主应变的关系,推导求解主应变及其方向余弦的齐次方程组。根据齐次方程组非零解
12、的条件,可以确定关于求解主应力的应变状态特征方程。 根据特征方程,可以确定三个主应变。如果将主应变回代齐次方程组,并且注意到任意截面的三个方向余弦的平方和等于1,则可解应变主轴的方向余弦。 根据特征方程和应变不变量可知,主应变和应变主轴的特性与主应力和应力主轴是类似的。 1、位移微分表达式 弹性体内任一点的六个应变分量,即应变张量随着坐标轴的旋转而改变。因此是否可以像应力张量一样,对于某一个确定点,在某个坐标系下所有的切应变分量都为零,仅有正应变分量不等于零。即能否找到三个相互垂直的方向,在这三个方向上的微分线段在物体变形后只是各自改变长度,而其夹角仍为直角。答案是肯定的。 在任何应
13、变状态下,至少可以找到三个这样的垂直方向,在该方向仅有正应变而切应变为零。 具有该性质的方向,称为应变主轴或应变主方向,该方向的应变称为主应变。 设们:/为物体内某点在已知坐标系的应变张量,求其主应变&,&及应变主轴方向川,〃2,〃3。设MN为M点的主轴之一,其变形前的方向余弦为I,m,〃,主应变为£。令dp表示MN的长度,则相对伸长为£dp,如图所示 设材点的位移为(«,v,vv),则N点的位移为(w+du,v+dv,w+dw)o因为 d"二在x方向的变形位移分量+刚性转动位移在x方向的分量 =£/dp+刚性转动位移在工方向的分量 2、主应变齐次方程组即d“等于纯变形位移与
14、刚性转动位移在X方向的分量之和。根据上述公式,可得 根据公式 血=勺故+?4少+?匕也_弓中+%也 或者写作 /.11c (弓_时/+)7裕沈+了/*刀二0 同理可得 必+(弓++:/>"=0 1,1,、--rJ+-r^^+(^_8)〃=o 上述公式是关于/,〃?,〃的齐次线性方程组。 3、主应变特征方程与不变量 对于/,,〃,〃的齐次线性方程组,其非零解的条件为其系数行列式的值为零。即11 "5云4 将上式展开,可得主应变特征方程,#-+侦-J3=0 其中Ji=&=勺+勺+% %二与弓+^^+^--(7^+什+/£) J3=|&| 显然与应力不变量相
15、同,Jl,J2,/3为应变不变量,分别称为第一,第二和第三应变不变量。 根据特征方程,可以求解得到三个主应变。将求解后的主应变代入公式,并注意到任意一点三个方向余弦的平方和等于1,则可解应变主轴的方向余弦。 由应力张量和应变张量,应力不变量和应变不变量之间的公式的比较可知,主应变和应变主轴的特性与主应力和应力主轴是类似的。 七、体积应变(略,自学)体积应变等于零的位移模式,称之为等容位移;(等容波) 微元体刚性小转动等于零的位移模式,称之为无旋位移;(无旋波) 八、有限变形情况下的应变一一格林应变(拉格朗日应变)和阿尔曼西应变(欧拉应变) 什么是有限变形:位移分量及其偏导数不是很小
16、的量。 1、格林应变张量变形前的微三角形△PQR,变形后仍然为微三角形八P0RL微三角形的边长(线素)的改变即可确定其大小和形状的改变,但三角形整体位置的改变就不能由各边自身的变化来确定。可见,分析三角形任意两点间距离的变化是分析变形的关键。 变形前的微三角形△PQR,变形后仍然为微三角形八P0RL微三角形的边长(线素)的改变即可确定其大小和形状的改变,但三角形整体位置的改变就不能由各边自身的变化来确定。可见,分析三角形任意两点间距离的变化是分析变形的关键。 变形前 变形后 构型 B B' 质点 尸(*2,《) P'(X],易,七) Q(q+da},a2+da2,
17、a3+do;) Q'(再+dr〕,Jr?+dr2,x3+dr,) 如果采用拉格朗日描述方法,那么有 (0.5) (《) (0.6) 变形前线元P。的长度为ds°,变形后线元P'。'的长度为ds,那么有 (d?0)2=(也[)2+(阴)2+(皿尸=dqdq=3ijdaj6aj (0.7) (ds)2=(dVj)2+(dv2)2+(dx5)2=dv.dx; (0.8) 将式(0.6)代入式(0.8),有 (0.9) 那么线元长度改变的平方差为(0.10) (0.10) (d5)2-(d50)2= 定义格林应变张量为(同样的方法,采用欧拉描述,可以推导阿
18、尔曼西Almansi张量,见参考文献5或者参考文献2)2、格林应变的物理意义 2、格林应变的物理意义 E’j ~2oa.da-iJ \•J A.用格林应变表示线元的伸长度 假设取线元 *=也1弓+()勺+(胳 也就是说 (曲)2=伽)2 da2=0d《=() (0.⑵ (0.13) (0.14) (0.15) P的坐标为(也,工2,毛),R'的坐标为(凡+山卜易+汁弓,毛+也),根据式。6),并考虑 到式(0.15),此时有 虬与d%(0.16) ca, 再将式(0.15)代入式(0.10),并考虑到式(0.14) (ds)、(dsJ』毕尹_1=2E
19、n(dq尸=2柘(d%尸(0.17) koa\°%7 d$=|P'Rl=Jl+2%ds°=Jl+2E“d"i(0.18) 「是,线元的相对伸长度为 E[=气击。=Jl+2E]i-1(0.19) 备。 可见林与线元的相对伸长度有关,在小变形时,有环《1,由Taylor展开,并略去高次项, (0.3) (0.3) z/,.=X.(67),a2-q 另外,变形后不会出现开裂或者重叠,那么光和《之间存在一一对应关系,因而式(0.2) 的雅可比行列式不等于零. da. dx}daxdx2da}ox3cax dx} da2 da2dxyda2 daydx2caydx
20、yday (0.4) 二、弹性体变形程度的表征一一应变;什么是应变?应变的一般定义形式 弹性体是一类特殊的变形体,特殊在卸载后其变形将完全恢复。要研究弹性力学,一个重要的前提就是要采用合适的方式来表征弹性体的变形。 粗略的观察,物体变形有形状改变和体积改变两种情况,但如何再进一步简化,也就是要讨论变形的基本类型并明确其挨量的方法。 在数学上,一个物体的形状通常采用长度和州度两个量来描述。因此,我们容易想到是,物体的变形也应该采用长度的变化和角度的变化来描述。例如,对于一个圆截面的柱件(如图1.1.1(a)所示),如果在柱的两端作用一对大小相同的拉力F,则该柱的长度将会由原
21、来的/伸长为/'(如图1.1.1(b)所示),由此我们说该柱体发生了变形;而如果在柱的两端作用一对大小相同的扭矩M,则该柱体的柱面将发生扭转(如图1.1.1(c)所示),扭转的程度可以采用柱体上下端面相对转动的角度ZPQ晚来表示, B、用格林应变表示两线元之间直角的改变如图,取两个相互垂直的线元"X和 如图,取两个相互垂直的线元"X和 PR=也冬+0e2+0。3 (0.21) 参考式(0.6),也就是下式 有下面的表格: 构型 变形前 B PQ=0q+d«2e2+0勺 .cx,n, d.v„=—datn。i da. 变形后 B' (0.22) (0.23)
22、 质点 户'3,邑,工3)R,"+斜•+鲁血"+岩M Q'k+^-da.,易+^_da,s[da2da2ca2 将变形后的线元P'R;和P'O视作矢量,并假设它们的夹角为。,求其点积 P'R'P'Q‘=|P'R'||P'Q'|cos。 (0.24) =斜漏俱)住4部)住网)借"=|=2%dqd。、 I例初2J"考虑到式(0.18),我们有 |P7T|=Jl+2E“d%(0.25)|P0|=Jl+2旦皿2(0.26) 将式(0.25)和式(0.26)代入式(0.24),得到cos0=.2E'j=(0.27) Jl+2EnJl+2&2由于/9=|-/(/是直角的改变量
23、),于是有 2E sinZ=.ZZL,;—(0.28)Jl+2E"1+2E” 在小变形时,耳|«1,弓《1,sin/a/,得到r=2Ei2(0.29) E“=匕(030)2 在微小变形情况,这与材料力学定义的剪应变一致。 3、用位移表达的格林应变 格林应变的定义为 由于上可表示为 (0.32) 式(0.32)中,虬“是变形位移,那么有 笊=$I凯—mi。datoat (0.33) 将式(0.33)代入格林应变的表达式(0.31),并利用*的置换性质 例』-啊J 2'da.da.1da.da. >»} (0.34) =1冬+2+ 2da.datda.
24、啊 式(0.34)就是用位移分量表达的格林应变。在笛卡尔坐标系中,展开后的常规形式是 \2 + ](割*僧)+fe)] (0.35) 应该指出,在格林应变的推导中,对变形未作任何假设,并不要求位移分量和它们的偏导数都是很小的量,所以格林应变可以适用于有限变形的情况。 已知任意点的格林应变,就可以知道该点任意方向的线元的长度变化及方向的变化。可见格林应变张量幻出了物体变形的全部信息。(具体的证明见“陆明万书P58-P59”) 4、从格林应变到小变形应变(柯西应变) 线弹性理论的研究对象是位移比物体最小结构尺寸小得多的变形情况。此时位移分量的一阶导数远小于1,即有 在小变形情
25、况下,格林应变公式(0.34)中的非线性项也是高阶小量,将其忽略后可简化为(0.37) 式(0.37)称为柯西应变张量,或者小变形应变张量。 九、变形协调方程(略) 任意一个二阶张量可以写成一个对称张量和一个反对称张量的形式,那么有0 2 2■' 'dx' i 1 2^- '(Lx 1 -(o. 2- 0 1 —a)r 2 x dy + 1 2^ £y 1 dy 1 一弭 1 -CDV 2x 0 dz 1 3r” 1 dz 0 2 2■' 'dx' i 1 2^- '(Lx
26、1 -(o. 2- 0 1 —a)r 3 x dy + 1 2^ £y 1 dy 1 一弭 1 -CDV 2x 0 dz 1 3r” 1 dz du= (0.38) 己知弹性体的位移场,能否求得柯西应变?(有限元方法,先确定位移场,再确定应变) 1. 己知应变场,能否求得位移场?(六个儿何方程,6个应变,三个位移场,矛盾方程组)6个应变之间应该满足几个关系?(Washizu对变形协调条件必须的数Fl作了如下的讨论) 2. 变形与位移的关系?准确地说:应变和微元体的刚性小转动一起描述了变形。 学习思路: 变形协调方程的数学
27、意义是:要使以三个位移分量为未知函数的六个几何方程不矛盾,则应变分量必须满足的必要条件。 应变协调方程的物理意义可以从弹性体的变形连续性质作出解释。如果变形不满足一定的关系,变形后的物体将出现缝隙或嵌入现象,不能重新组合成连续体。 为使变形后的微分单元体连续,应变分量必须满足一定的关系,这一关系就是应变协调方程,又称圣维南(SaintVcnant)方程。 假如弹性体是单连通域的,应变协调方程不仅是变形连续的必要条件,而且也是充分条件。 利用位移函数的微分沿任意路径重新积分可以确定的位移必然是单值位移的条件,可以证明应变协调方程。 对于多连通域问题,应变分量满足变形协调方程只是位移连续
28、的必要条件, 只有加上位移连续补充条件作为充分条件。 1、变形协调举例 几何方程表明,六个应变分量是通过三个位移分量表示的,因此六个应变分量将不可能是互不相关的,应变分量之间必然存在某种联系。 这个问题对于弹性力学分析是非常重要的。因为如果已知位移分量,容易通过几何方程的求导过程获得应变分量;但是反之,如果已知应变分量,则几何方程的六个方程将仅面对三个未知的位移函数,方程数显然超过未知函数的个数,方程组将可能是矛盾的。 随意给出六个应变分量,不一定能求出对应的位移。例如: 例1设应变分量为:【二3r|「一^-,Ui;■■■■■,求其位移 解: s=—=3x9=—x2+f(y)
29、 xdx2E) dv2 ■•,勺、二2y,-v=y+涂) dvduc/、,/、 dy显然该应变分量没有对应的位移。 要使这一方程组不矛盾,则六个应变分量必须满足一定的条件 以下我们将着手建立这一条件。 2、变形协调方程 首先从几何方程中消去位移分量,把几何方程的第一式和第二式分别对工和),求二阶偏导数,然后相加,并利用第四式,可得 勺+=腊为+四二”右,dx2dy2dxdydxdydxdy 若将几何方程的第四,五,六式分别对z,X,y求一阶偏导数,然后四和六两式相加并减去第五式,则里孔孔+叽3七dxdydzdydz 将上式对工求一阶偏导数,则A(-g+机+幻)=2
30、dxdxdydzdydz分别轮换x,),,z,则可得如下六个关系式 故2dy2dxdy 色+萱二% d2ydz2dydz 3旗3/X+£_—/* a?"~dxdz 如地+吼,室)=2也 dxdxdydzdydz 3(机机+机)_2钾勺 dy3xdydzdxdz 里%+吼一%)=2业 dzdxdydzdxdy 上述方程称为应变协调方程或者变形协调方程,又称圣维南(SaintVenant)方程。 3、变形协调方程的意义 变形协调方程的数学意义是:要使三个位移分量为未知函数的六个几何方程不相矛盾,则应变分量必须满足的必要条件。 应变协调方程的物理意义可以从弹性体的变形连
31、续作出解释。假如物体分割成无数个微分六面体单元,变形后每一单元体都发生形状改变,如变形不满足一定的关系,变形后的单元体将不能重新组合成连续体,其间将产生缝隙或嵌入现象。 为使变形后的微分单元体仍能重新组合成连续体,应变分量必须满足一定的关系,这一关系就是应变协调方程。 假如弹性体是单连通域的,则应变分量满足应变协调方程不仅是变形连续的必要条件,而且也是充分条件。 为证明应变协调方程是变形体连续的必要和充分条件,我们可利用弹性体变形连续的物理意义,反映在数学上则要求位移分量为单值连续函数的性质。 我们的目的就是证明:如果已知应变分量满足应变协调方程,则对于单连通域,就一定可以通过几何方
32、程的积分求得单值连续的位移分量。 下面我们推导单连通域的变形协调关系。 4、变形协调方程证明 所谓的单连通域,是指该物体内任一条闭曲线可以收缩到一点而不越出界外。 设应变分量句•单值连续,并有连续的二阶导数,则由da)x=——-dx+——-dy+——-azdxdydz 轮换x,y,z计算,可得du,dw和dc”y,。 如果能够通过积分,计算出r11 (]裕+电)&+弓曲+(!&-电)也 “二队o+J&&+(57冷_&)功+(5/芯+%)也 RPz2 V=VO+J时 卬二W°+J)dx+(-Yyi+^)dy+s.Azpqp22 f也dx+匹功+匹也 dx,dydz 『
33、da)yt如》,dcoy,—dx+—dy+—-dz &欲dydz四二武+i也故+丛曲+丝土也i3y"9z 上述位移和转动分量如果是单值连续的,则可得到弹性体的位移单值连续的条件。 5、变形协调方程证明2 保证上述位移单值连续的条件是其积分与积分路径PoP无关。其充分与必要条件为5r« 5r« plazlaz@ 根据上述公式的第三式,可得 2dydzdydzddu棚3dvdu_13dw3v_deux 1 dydzcbcdzdxdy2dxdydzdx同理,根据上述公式的第四和第八式,可得少,•对),,z的偏导数。即匹=【(%_%) dx2dydz匹=]性匹 dy2dyd
34、z3四_13% dzdy2dz将计算"'对),,z的偏导数回代到公式的第一式,则可以得到转动分量表达式 上(吼-g)dx+(L约-萱炒+(鱼-上也勺旺 dydz2qydzdy2dz 如使所单值连续,其必要与充分条件是2Aa1吼a勺 2dydx2dydz 电(地匹)dydy2dz7dz2dydz 或写作3匕注育=% dy2dz2dydza(。上_8作淫%胪勺 dydxdydzdxdz 同理,讨论SV和口£的单值连续条件可得出类似的四个公式。将单值连续的口》,口,和口z代入位移计算公式,则可得到单值连续的位移〃,V,Wo 由此可证变形协调方程是单连通域位移单值连续的必要和充
35、分条件。 6、多连域的变形协调 如果弹性体中的一条封闭曲线,若收缩至一点必须越出域外,则为多连通域物体。 LZI 一个多连通域物体,可用若干个截面将物体部分的截开,使之成为单连通域。如果所需的截面数为〃,则物体为〃+1连域。 平面为有两个环形孔的物体,两个截面即可使其成为单连通域,所以为三连域。 对于多连通域问题,应变满足变形协调方程并不能确保位移在分割后的单连通域内单值连续。因为当位移分别从截面两侧趋近于截面上的某一点时,一般的说其将趋于不同的值。 分别用〃+,v+,w+和〃V-,VV-表示截面两侧的位移,则多连通域的位移单值连续条件还需要补充条件〃+=〃-,v+=v-,w+=
36、\v- 条件,只有加上上述补充条件后,条件才是充分的。 图1.1.1圆截面柱体及其典型的变形形式 要完整地描述物体变形的程度,实际上就是需要知道物体上每一点与任意其它点连线的长度变化率和这些连线间夹角的变化。 图1.1.2变形前后的点和线段图1.1.3两条相互垂直的线段变形后在原所在平而上的投影 如图1.1.2所示,设P点为变形前物体上的任意一点,要完整地描述物体变形的程度,就是需要描述清楚P点处任意方向〃上线段PN的长度|PN|的变化率,以及线段PN与任意方 向为m上的线段PM之间夹角的变化。为了计算方便,通常取PM1.PN,即匕MPN=, 显然,可以采用很多种方
37、式描述PN的长度变化率,如 |取|-|州,可.. \PN\|PW'||P/V|2 同样地,描述PN与PM之间夹角的变化方式也有很多种,如 /MPN-CM'PN',cosyMPN)-cos(ZM'P'N'),s\n(匕MPN-ZM'PN'),...... 究竟采用何种形式,则要取决于后续计算的方便性、结果的简洁性等多方面的因素。 另外,为了使采用的描述方式不受线段P/V和PM的长度任意性的影响,我们需要采用极限的形式,令1小|->0,\pm\t0,从而得到反映P点处变形程度的表示。 但是,由于过P点处可以作无数条线段PN和PM,因此P点处变形程度这一量可能需要无穷多个分量才能表示
38、,除非这无穷多个分量具有一定的内在规律,或者只需要采用有限个分量表示,而其余任意分量均可以通过这有限个分量即可完全表达。 非常幸运和有趣的是,运用变形的连续性假设,我们的确可以证明,在一般的三维情况下,P点处变形程度这•量只需要采用三个互不平行方向上线段的长度变化率以及它们两两间角度的变化共九(六)个量即可完全表达。如前所述,为了计算方便,这里的三个互不平行方向上线段通常取成是三个互相垂直方向上的线段。 在一般有限变形的情况下,P点处任意方向n上线段PN的长度变化率可以采用如下形式进行定义,E鸣略 E鸣略 2|P/V|2 而P点处任意方向n上线段PN和任意方向m上线段PM之间夹角
39、度的变化表示为 _.F/V7•P'M' E,,ni~2|PN||PM| (1.1.2) 利用(1.1.1)式,可以得到 Etini=Emn=lim《+2E"“"\I1+2E叫cos/m'PN'nmm>,|PM|->0 I/W|tO 当变形很小时, Ealim2网佃州-倒) nn\PN\->0 2\PN\" =岫叫「时 |㈣to|PN| 〜lim应 I㈣―。|P州= (1.1.3) 5屈 |PAr|->0 =-limsin--ZMPW, 2|十)"2) =-limsin(ZMPN-ZM'P'N') 2|p.w|->()'/ lim(ZMPN—2M;P:
40、N;) 2|pm|->()1117 |曲|一0 %鲫""'崎+徐丽) |av|->o«-lim(tanZM.PM;+tanZN;P;N;) 2网I-。1117 MM |/W|->0=—lim 2|pm|to|av|->o' v—lim 2pm|t() |PN|->0 =—lim 2|pm|to|av|->o' v—lim 2pm|t() |PN|->0 —:+_:_11|W| (1.1.4) 网m"\pm\网 在给定的坐标系的三维情况下,只要令上述式中,和m方向分别为某坐标轴的方向,即可得到用于描述P点处变形程度的六个分量表达式。 三、线弹性、小
41、变形假设下的应变一一柯西应变几何方程1、位移函数 由于载荷作用或者温度变化等外界因素等影响,物体内各点在空间的位置将发生变化,即产生位移。这个移动过程,弹性体将可能同时发生两种位移变化。 第一种位移是位置的改变,但是物体内部各个点仍然保持初始状态的相对位置不变,这种位移是物体在空间做刚体运动引起的,因此称为刚体位移。 第二种位移是弹性体形状的变化,位移发生时不仅改变物体的绝对位置,而且改变了物体内部各个点的相对位置,这是物体形状变化引起的位移,称为变形。 一般来说,刚体位移和变形是同时出现的。当然,对于弹性力学,主要是研究变形,因为变形和弹性体的应力有着直接的关系。 根据连续性
42、假设,弹性体在变形前和变形后仍保持为连续体。那么弹性体中某点在变形过程中由M(x,y,z)移动至M,(X1,y',z'),这一过程也将是连续的,如图所示。在数学上,f,V,z,必为x,y,z的单值连续函数。设为位移矢量,其三个分量“,V,w为位移分量。则u=xf(x,y,z)-x=u3y,z), v=y,(x,y,z)-y=v(x,y,z) w=z'3y,z)-z=w(x,y,z) 显然,位移分量〃,匕附也是*,z的单值连续函数。以后的分析将进一步假定位移函数具有三阶连续导数。 (吴家龙教材P32)由小变形、线弹性的假设得到:与坐标轴平行的微分线段在变形后一般要旋转一个角度;但是这个转
43、角是极其微小的,可以用变形以后的的微分线段在相应坐标轴上的投影来代替变形后微分线段的长度。 2、变形与应变分量 为进一步研究弹性体的变形情况,假设从弹性体中分割出一个微分六面体单元,其六个面分别与三个坐标轴垂直。 对于微分单元体的变形,将分为两个部分讨论。一是微分单元体棱边的伸长和缩短;二是棱边之间夹角的变化。弹性力学分别使用正应变和切应变表示这两种变形的。 对于微分平行六面体单元,设其变形前与X,),,Z坐标轴平行的棱边分别为MA,MB,MC,变形后分别变为MA,MB,MC。 假设分别用&,乾&表示x,y,z轴方向棱边的相对伸长度,即正应变;分别用/vy,Yyz,/zx表示X
44、和和Z,Z和X轴之间的夹角变化,即切应变。则B'—M8 B'—M8 MrAr-MAjr jr jr “2 IT Xxx=--ZCfMfAf 对于小变形问题,为了简化分析,将微分单元体分别投影到Oxy,Oyz,Ozx平面来讨论。 显然,单元体变形前各棱边是与坐标面平行的,变形后棱边将有相应的转动,但我们讨论的是小变形问题,这种转动所带来的影响较小。特别是物体位移中不影响变形的计算,假设各点的位移仅为自身的大小和形状的变化所确定,则这种微分线段的转动的误差是十分微小的,不会导致微分单元体的变形有明显的变化。 3、正应变表达式 首先讨论。◎面上投影的变形。 设
45、〃也,"泊分别为MA,MB的投影,m'a\〃必分别为M'A',MB,即变形后的MX,MB的投影。 微分单元体的棱边长为cbr,dy,dz,M点的坐标为3y9z),u(x,y,z),v(x,y,z)分别表示M点x,y方向的位移分量。 则A,B点的位移分别为 du.即,m淑, u+—dx,v+—dx和“+—ay, dx&cdy dv v+—ay 则A点的位移为M(x+dx,y,z),v(x+dx,),,z),,点的位移为〃(x,y+dy,z),v(x,),+dy,z)o按泰勒级数将A,8两点的位移展开,并且略去二阶以上的小量,因为 MM,^w,a,=dx+w+—dx-u=dx+
46、—dx dxdx 所以5/1,w/idx+当dx-dx令 =MA-MA^_虹笊 dx MA 'dx同理可得 dw dvF ydy'dz 由此可以得到弹性体内任意一点微分线段的相对伸长度,即正应变。显然微分线段伸长,则正应变&•,幽&大于零,反之则小于零。 3、切应变分量 以下讨论切应变表达关系。 假设入,为与X轴平行的微分线段〃心向y轴转过的角度,/即为与y轴平行的〃活向x轴转过的角度。则切应变j-至二:-4X侦二代+给 因为I即13v ,,,V*—dx—V,%Man^=—==-^-4 心'dx+竺dx1悝故dxdx 上式的推导中,利用了小变形条件下位移的
47、导数是高阶小量的结论。同理可得 四.1•和•可为正或为负,其正负号的几何意义为:岳・.1•大于零,表示位移V随坐标工而增加,即x方向的微分线段正向向y轴旋转。将上述两式代入切应变表达式,则同理可得 _+3vdydz,5dzdx 切应变分量大于零,表示微分线段的夹角缩小,反之则增大。 5、几何方程与应变张量 综上所述,应变分量与位移分量之间的关系为dudvdw XT=XT=XT二、阪''dy9zdz9 dvdudwdvdudwY———+、y=+——、y=+ "欲莎%出汤儿%dx上述公式称为几何方程,又称柯西方程。 柯西方程给出了位移分量和应变分量之间的关系。如果已知位移,由位移
48、函数的偏导数即可求得应变;但是如果已知应变,由于六个应变分量对应三个位移分量,则其求解将相对复杂。这个问题以后作专门讨论。 几何方程给出的应变通常称为工程应变。 如果使用张量符号,则几何方程可以表达为1,、 上式表明应变分量句将满足二阶张量的坐标变换关系,应变张量分量与工程应变分量的关系可表示为 四、纯变形位移与刚性转动位移(与吴家龙教材P34“相对位移张量”对应) 学习思路: 应变分量通过位移的偏导数描述了一点的变形,对微分平行六面体单元棱边的伸长以及棱边之间夹角的改变做出定义。但是这还不能完全描述弹性体的变形,原因是没有考虑微分单元体的刚体转动。 如下图所示:/vv=+ay.,称之为剪应变;和a乒为直角两边改变的角度。当
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 36个关键词详解2025政府工作报告
- 学习2025年政府工作报告中的八大科技关键词
- 2025年政府工作报告要点速览接续奋斗共谱新篇
- 学习2025政府工作报告里的加减乘除
- 深化农村改革党课ppt课件(20250305)
- 弘扬雷锋精神凝聚奋进力量学习雷锋精神的丰富内涵和时代价值
- 深化农村改革推进乡村全面振兴心得体会范文(三篇)
- 2025年民营企业座谈会深度解读PPT课件
- 领导干部2024年述职述廉述责述学述法个人报告范文(四篇)
- 读懂2025中央一号党课ppt课件
- 2025年道路运输企业主要负责人安全考试练习题[含答案]
- 2024四川省雅安市中考英语真题[含答案]
- 2024湖南省中考英语真题[含答案]
- 2024宁夏中考英语真题[含答案]
- 2024四川省内江市中考英语真题[含答案]
