 机械手臂设计
机械手臂设计

《机械手臂设计》由会员分享,可在线阅读,更多相关《机械手臂设计(34页珍藏版)》请在装配图网上搜索。
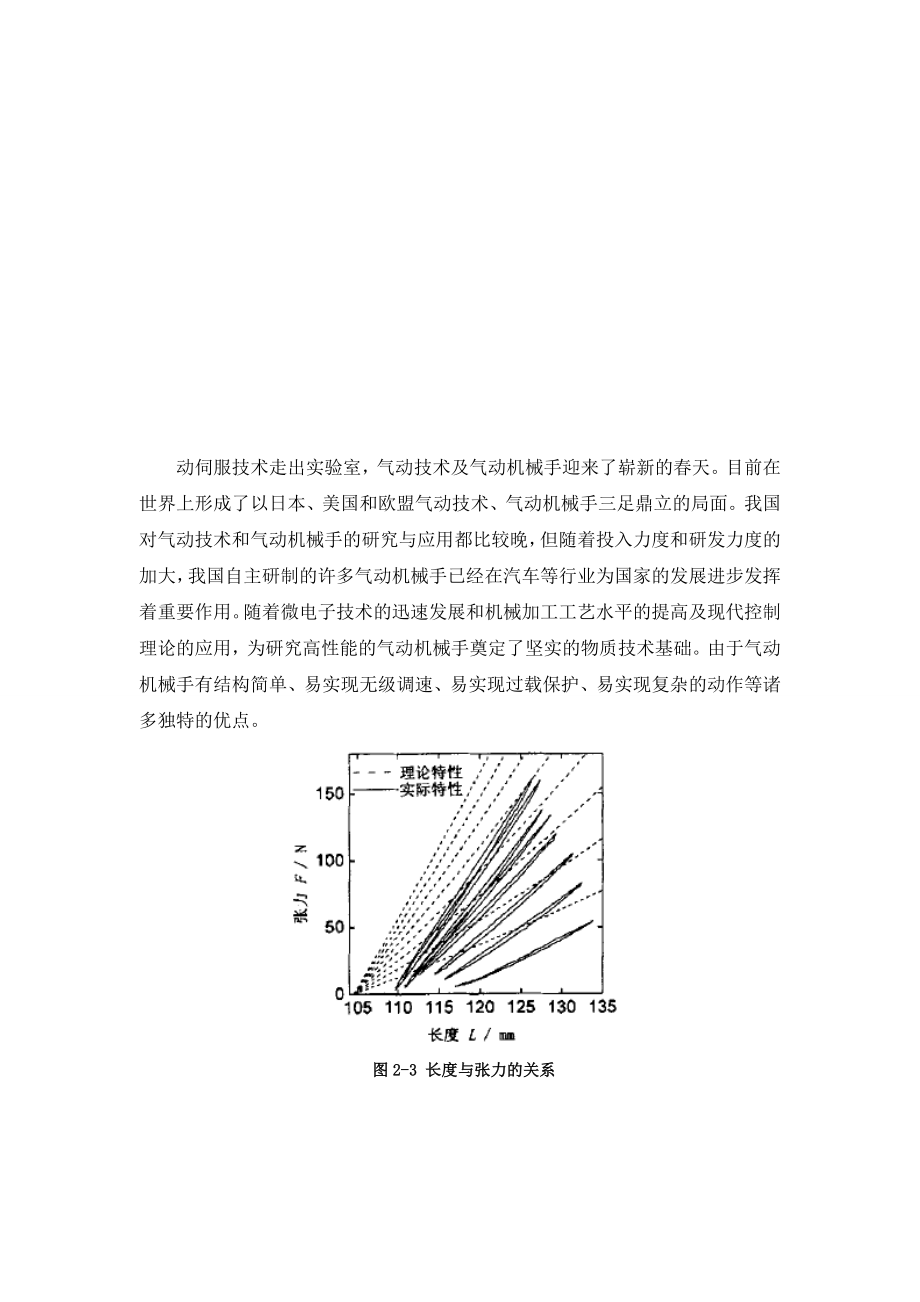
1、 动伺服技术走出实验室,气动技术及气动机械手迎来了崭新的春天。目前在世界上形成了以日本、美国和欧盟气动技术、气动机械手三足鼎立的局面。我国对气动技术和气动机械手的研究与应用都比较晚,但随着投入力度和研发力度的加大,我国自主研制的许多气动机械手已经在汽车等行业为国家的发展进步发挥着重要作用。随着微电子技术的迅速发展和机械加工工艺水平的提高及现代控制理论的应用,为研究高性能的气动机械手奠定了坚实的物质技术基础。由于气动机械手有结构简单、易实现无级调速、易实现过载保护、易实现复杂的动作等诸多独特的优点。 图2-3 长度与张力的关系
2、 2.1.3 气动肌肉的模型 在最简单的情况下,气动肌肉用作单作用驱动器,负载不变(如图2-4a)。假设气动肌肉上该负载一直存在,在没有压力的情况下,肌肉将从原始状态被拉伸一段长度,这是考虑气动肌肉的技术特性的一种理想工作状态:当加压时,气动肌肉在预拉伸状态下有最大的输出力和最佳动态性能,并且耗气量最小。在这种情况下,可用的力也最大。如果要求气动肌肉在扩张状态时无作用力(如允许附加上负载),首先就要加上用于提升负载目的的保持力,利用它的运动来移动作用力小的元件。 (a) (b) 图2-4不同外力作用下气
3、动肌肉表现形式 当外力发生变化时(如图2-4b),气动肌肉像一根弹簧;它与力的作用方向一致。对用作“气弹簧”的气动肌肉而言,预拉伸力和弹簧刚度都是变化的。气动肌肉在常压或体积不变的情况下可用作弹簧。这些气动肌肉会产生不同的弹簧特性,这使得它可很好地适用于具体应用[26]。 在机械设计手的设计过程中,为了简化设计的模型,使设计过程简单明了,采用如图2-5的二维简化模型。在三维模拟仿真阶段,由于气动肌肉所做的是拉 图2-5 二维简化模型 图2-6 三维简化模型 伸运动,为了实现肌肉的这种运动形式,把气动肌肉中部的隔膜软管的圆柱体改为长方体,并且为了定义滑动杆运动形式的方便
4、,把每一根气动肌肉看做是由左右两根等长的半根气动肌肉组成(如图2-6)。 2.2 气动机械手的基本结构 本课题所设计的气动机械手的结构如图2-7所示。 1. 机架 2. 气动肌肉 3. 第一肩关节 4. 第二肩关节 5. 机架臂 6. 第三肩关节 7. 大臂 8. 肘关节 9. 小臂 10. 腕关节 11. 气爪 图2-7 气动机械手的结构 气动机械手主要由起固定支撑作用的机架、机械臂和气爪三部分组成。气动机械手能够实现4个自由度(由于机构运动确定,因此机构的自由度等于机构的原动件数目,此机构有4个原动件,因此可得有4个
5、自由度)的运动,其各自的自由度的驱动全部由气动肌肉来实现。最前端的气爪抓取物品,通过气动肌肉的驱动实现各自关节的转动,使物品在空间上运动,根据合理的控制,最终实现机械手的动作要求。驱动第一肩关节的运动有2根气动肌肉组成,机架臂有4根气动肌肉组成,大臂上安装有4根气动肌肉,小臂上安装有4根气动肌肉。 2.3 气动机械手关节结构设计 2.3.1 关节的基本方式 在气动机械手设计中,有4个自由度,相当于4个独立的关节。每个关节的驱动原理都是相同的,即由一对相当于人类拮抗的气动肌肉相互之间的对抗作用来驱动关节。其原理如图2-8所示。这种方式驱动的关节,其刚度和两个肌肉的压力之和有关,而其
6、位置则和2个肌肉的压力差有关,因此可以实现关节位置和刚度的独立控制[27]。 图2-8 关节的基本驱动方式 2.3.2 肩关节结构设计 1) 第一肩关节的设计 第一肩关节主要是由2根气动肌肉作为驱动,实现绕Z轴(X、Y、Z轴的方向标在图2-7中,下同)转动这1个自由度,其结构简图如图2-9(a)所示。三维建模的第一肩关节结构如图2-9(b)所示。 图2-9(a) 第一肩关节结构简图 图2-9(b) 第一肩关节三维结构图 2) 第二肩关节的设计 第二肩关节和其下的4根机架臂相连接,为的是实现绕X轴旋转这1个自由度,其结构简图如图2-10a所示。三维
7、建模的第二肩关节结构如图2-10b所示。 图2-10(a)第二肩关节 图2-10(b)第二肩关节 结构简图 三维结构图 3) 第三肩关节的设计 第三肩关节是连接第二肩关节和大臂的纽带。主要零件是肩部连接腕和中部支撑杆。其中肩部连接腕固定在肩部连接轴上,在机架臂的带动下,使得大臂、小臂及气爪整体绕X轴的转动,其另一功能是连接大臂的4根气动肌肉。中部支撑杆是用来固定肘关节,是大臂的支撑杆。其三维结构图如图2-11所示。
8、 图2-11第三肩关节三维结构图 2.3.3肘关节结构设计 1) 虎克铰简介 气动机械手的设计难点主要在于肘关节和腕关节的实现。最灵活的关节形式就是球铰,有3个自由度,但是其实现复杂,控制难度比较大。在许多气动机械手的研究中,采用的驱动器都是电机,为实现肩关节的3个自由度,结构往往比较复杂[28,29]。作为2个自由度的机构,虎克铰的结构比较简单,且2个自由度之间的运动可以独立进行控制。由于驱动方式的限制,虎克铰的应用在机器人中不是很常见。本研究采用气动肌肉,可以方便地对这种机构进行控制,实现两个自由度的运动。在本设计中,采用如图2-12所示的虎克铰形式来实现肘关节的2个自由度[27]。
9、 图2-12 虎克铰的基本结构 2) 肘关节的结构设计 肘关节主要是由一个虎克铰的结构构成。由于虎克铰能够实现2个自由度,并且虎克铰的2根轴相互垂直,这就要求肘关节与大臂的气动肌肉的连接件必须具有两个方向单一的铰链点结构,其三维结构如图2-13所示。 图2-13 气动肌肉连接件 肘关节是连接大臂与小臂的重要关节。分别是通过中部支撑杆和前部支撑杆维系着这两个结构,其三维结构图如图2-14所示。其中一些重要的尺寸参数分别 图2-14 肘关节三维结构图 由X、Y轴方向来确定,肘关节X轴方向上的结构简图如图2-15a所示,绿色表示的是肌肉连接件,由于在X轴方向上,其与
10、气动肌肉没有相互转动,因此表示成同一条直线,绿色只是说明这里另一个零件,Y轴方向上的结构简图如图2-15b所示。当不同相邻的两根气动肌肉组成一对时,可以实现绕不同轴的旋转。如图 2-14(左图)所示,当前面的两根气动肌肉组成一对,即两根肌肉有相同的运动形式,可知后面的是一对,在运动过程中可以实现绕Y轴的转动。同样的左、右各为一对时,可以实现绕X轴的转动。 (a) X轴方向 (b) Y轴方向 图2-15 肘关节X、Y轴方向的结构简图 2.3.4 腕关节结构设计 腕关节大体上与肘关节的结构相似,主要有一个虎
11、克铰的结构构成。同样能够实现2个自由度,与肘关节不同的是绕着X轴、Z轴的旋转。腕关节和小臂的连接件和肘关节的连接件一样(如图2-13),是两个方向单一的铰链点。腕关节通过前部支撑杆和肘关节固定,前端安装有一个气爪。其三维结构如图2-16所示。 图2-16 腕关节三维结构图 腕关节设计过程中的一些重要尺寸参数有X轴,Z轴方向来确定。其在X轴方向上的结构简图如图2-17(a)所示,Z轴如图2-17(b)所示。 (a) X轴方向 (b) Z轴方向 图2-17 腕关节X、Z轴方向的结构简图 第3章 气动机械手关节结构参数
12、设计 3.1 参数设计优点 一个产品的问世主要包括提出想法,初步确定方案,探讨方案进行可行性分析,最终确定方案,研制,以及最终成型。在设计的初级阶段主要是考虑方案的可行性,确定方案后,参数化设计各个结构零件,可以获得最满意的结果[30]。 结合本次所设计的气动机械手,参数化设计零件的优点是在相同的结构下,使每一个关节获得最大的运动范围,即绕各自的转动轴获得最大的转动角。 3.2 肩关节结构参数设计 3.2.1第一肩关节结构参数设计 第一肩关节的结构简图如图3-1所示。 图3-1 第一肩关节的结构简图 假定CBOEC1是第一肩关节开始的运动位置,BDD1E可绕O点旋转
13、,逆时针旋转的极限位置是B1OE1,这时出现死点的现象,即当CB1O在同一直线上,连接BO,B1O,EO,E1O,C1O。作O点到CD的垂线交CD的延长线于F点。设OA= a,AD= d,BD= b,BC=L,BO= B1O= EO= E1O=R。 (1)确定b b是肌肉连接件的铰链点到肩部肌肉连接件的距离,根据结构可得b=35mm。 (2)确定L 根据气动肌肉的型号,选定没有充气时长度为250mm的气动肌肉,其最大运动行程是原始长度的20%,在运动的开始位置,取其最大收缩长度的一半,即是225mm,在加上气动肌肉本身结构(如图2-5)的其他长度,两个铰链点的长度L=225+50=27
14、5mm,L的范围是(27525)mm。 (3)确定a a是如图2-8b所示的肩部肌肉连接件宽度的一半,d是长度的一半。 设为逆时针旋转时的最大角度,可知BOB1=,EOE1=,由于BOCEOC,所以EOC1=BOC=。 =BOC=FBOFCO=arctanarctan =arctanarctan (3-1) 由公式(3-1)可知: tan=== (3-2) 由于tan在是单调增函数,b,L为已知,所以当a取得最小值时,tan取得最大值,即取得最大值。由于O点处装有一根20mm的连接杆
15、,因此取肩部肌肉连接件的宽度为30mm,即半宽a=15mm。 (4)确定d 由公式(2)可知,tan=1.079 47.2º 当=47.2º代入公式(1-1)可知d无解。 计算BOE旋转到B1OE1的极限位置,其中气动肌肉CB1250mm,C1E1300mm。 CB1=COB1O=COR= =250mm (3-3) 由公式(3-3)可得mm (3-4) 已知C1OE1=2 (3-5) 其中C1O=CO= =
16、 E1O=R==
= arctanarctan
代入公式(3-5)可得mm (3-6)
根据气动肌肉的结构,在安装时,2d24mm,
即 d12mm (3-7)
有(3-4)、(3-6)、(3-7)式得 mm
由公式(3-2)知tan=,由于d< 17、 =0.564
得=29.4º。
所以第一肩关节绕Z轴的理论最大运动范围为(29.4º,29.4º)。
3.2.2第二肩关节结构参数设计
第二肩关节的结构简图如图3-2所示。
假定CAOEC1是第二肩关节开始的运动位置,铰链点A,E可绕O点旋转,逆时针的极限位置是A1OE1,即当CA1O在同一条直线上,连接AO,A1O,EO,E1O。作O点到CA的垂线交CA的延长线于F点。连接AE,作O点垂直AE交AE于B点。设AB= a,OB= b,AC=L,AO=A1O=EO=E1O=R。
(1)确定L
根据气动肌肉的型号 18、,选定没有充气时长度为230mm的气动肌肉,其最大运动行程是原始长度的20%,在运动的开始位置,取其最大收缩长度的一半,即是207mm,再加上气动肌肉本身结构(如图2-5)的长度,两个铰链点的长度L=207+67=274mm,L的范围是(27423)mm。
(2)确定b
设为逆时针旋转时的最大角度,可知AOA1=,EOE1=,由于AOCEOC1,所以EOC1=AOC=。
=AOC=FAOFCO=arctan
arctan=arctanarctan (3-8)
有公式(3-8)可知:
tan===
(3-9)
由于tan在是单调增 19、函数,L为已知,所以当b取得最小值时,tan取得最大值,即取得最大值。由于由于O点处装有一根20mm的连接杆,因此取合适的最小的b=20mm。
(3)确定a
由公式(3-9)可知,tan=1.787
得 60.8º
当60.8º代入公式(3-8)可知a无解。
计算AOE旋转到A1OE1的极限位置,其中气动肌肉CA1251mm,C1E1297mm。
CA1=COA1O=COR=
=251mm (3-10)
由公式(3-10)可得mm (3-11)
已知 20、C1OE1=2
(3-12)
其中C1O=CO= =
E1O=R==
= arctanarctan
代入公式(3-12)可得mm (3-13)
根据气动肌肉的结构,在安装时,2a24mm,即
a12mm (3-14)
有(3-11)、(3-13)、(3-14)式得 mm
由公式(3-9)知 tan=,由于a< 21、是最大的,在这里取a=23mm。
(4)确定
由公式(3-9)得 tan===0.983
得=44.5º
所以第二肩关节绕X轴的理论最大运动范围为(44.5º,44.5º)。
3.2.3第三肩关节结构参数设计
第三肩关节通过大臂上的气动肌肉连接到肘关节上。第三肩关节的零件尺寸与肘关节的零件尺寸有关,其零件尺寸是通过肘关节的零件尺寸来确定的。因此第三肩关节的零件参数化设计详见肘关节的零件设计。
3.3 肘关节结构参数设计
肘关节的零件尺寸确定可以分为两个方向,即X轴和Y轴方向。下面分别就X轴和Y轴方向上的参数化设计进行阐述。
3.3.1 X轴方向上的结构参数设计
22、
肘关节在X轴方向上的结构简图如图3-3所示。
假定CABC1是肘关节开始的运动位置,A,B可绕O点旋转, 顺时针旋转的极限位置是A1OB1,这时出现死点现象,即当CA1O在同一直线上,连接A1O,B1O。设OA= a,AD= b,DD1=L。红色虚线框表示肘部挡板。
(1)确定b
b是肌肉连接件的长度,根据结构得b=45mm。
(2)确定L
根据气动肌肉的型号,选定没有充气时长度为230mm的气动肌肉,其最大运动行程是原始长度的20%,在运动的开始位置,取其最大收缩长度的一半,即是207mm,在加上气动肌肉本身结构(如图2-5)的其他长度,两个铰链点的长度L=207+50=257m 23、m,L的范围是(25723)mm。
(3)确定a
A,B表示肘部挡板上连接肌肉连接件的两个铰链点,a是两个铰链点距离的一半。
设为顺时针旋转时的最大角度,可知AOC1=,BOB1=。
tan== (3-15)
由公式(3-15)可知,tan在是单调增函数,b,L为已知,所以当a取得最小值时,tan取得最大值,即取得最大值。当a0时,=90º。
计算AOB旋转到A1OB1的极限位置,其中A1C2b+Lmin=245+234
=324mm。B1C12b+Lmax=245+ 24、280=370mm。
A1C= COA1O= A1O=a324mm (3-16)
由公式(3-16)可得 mm (3-17)
已知BOB1=,得OBB1=,
B1BC1=OBB1+OBC1=+=
(3-18)
==
得BB1=
BC1=AC=2b+L=347mm
=arctan
代入公式(3-18)得mm (3-19)
根据气动肌肉的结构,在安装时,2a24mm,
即 a12mm 25、 (3-20)
由(3-17)、(3-19)、(3-20)式得 mm
由公式(3-15)可知 tan==,且已知L=257mm,b=45mm,当取最小值a=12时,tan取得最大值。
(4)确定
tan====28.9
得 =88.0 º
所以肘关节绕X轴的理论最大运动范围为(88.0º,88.0º)。
由此可以得到第三肩关节的两个铰链点之间的距离为2a=24mm。
3.3.2 Y轴方向上的结构参数设计
肘关节在Y轴方向上的结构简图如图3-4所示。
假定CAOA1C1是肘关节开始的运动位置,D,B可绕O点旋转 26、,作以O点为圆心,OD为半径的圆。顺时针旋转的极限位置是D1OB1,这时出现死点的现象,即当CD1O在同一直线上,连接DO,D1O,BO,B1O,C1O。设OA= a,AD= b,DC=L。
(1)确定a
设为顺时针旋转时的最大角度,可知DOC=,BOB1=。由于DOCBOC1,所以BOC1=DOC =。
=DOC=AOCAOD
=arctanarctan
=arctanarctan (3-21)
有公式(3-21)可知:
tan=====1.10
可得 47.8º
计算DOB旋转到D1OB1的极限位置,其中CD1234mm,C1B1280mm。
27、
CD1=COD1O=
=234mm (3-22)
由公式(3-22)可得mm (3-23)
已知C1OB1=2
(3-24)
其中C1O=CO= =
B1O=R==
=arctanarctan
代入公式(3-24)可得mm (3-25)
根据气动肌肉的结构,在安装时,2a24mm,
即 a12mm 28、 (3-26)
有(3-23)、(3-25)、(3-26)式得 mm
可知 tan=,由于a< 29、向。
(1)X轴方向上的结构参数设计
腕关节X轴方向上的结构简图与肘关节X轴方向的一样,因此直接得到结果:
取最小值a=12mm时,tan取得最大值,tan=28.9,得=88.0 º。
腕关节绕Z轴的理论最大运动范围为(88.0º,88.0º)。
由此可以得到腕肩关节挡板上的两个铰链点之间的距离为2a=24mm。
(2)Z轴方向上的结构参数设计
腕关节Z轴方向上的结构简图与肘关节Y轴方向的一样,因此直接得到结果:
取最大值a=32mm时,tan取得最大值,tan=0.563,得=29.4º。
腕关节绕X轴的理论最大运动范围为(29.4º,29.4º)。
由此可以得 30、到腕关节两块挡板的两个铰链点之间的距离为2a=64mm。
第4章 气动机械手关节的模拟仿真
4.1 仿真内容
运动仿真是结构构设计的一个重要内容,气动机械手是一个复杂的机构,确定结构后,在运行中还会发生干涉现象,因此需要进行运动学仿真分析,确保方案可行。在运动仿真过程中,对结构零件不断进行修改,最终满足设计要求[31]。
仿真的基本内容是对结构进行可行性分析,运动学分析,增大机械手的运动范围,使其更好的满足生产需要。结合本次设计的气动机械手,仿真的内容是
(1)第一肩关节的运动仿真;
(2)第二肩关节的运动仿真;
(3)肘关节X轴方向的运动仿真;
(4)肘关节Y轴方向的运动仿真 31、;
(5)腕关节X轴方向的运动仿真;
(6)腕关节Z轴方向的运动仿真;
(7)第一、二肩关节,肘关节X轴方向,腕关节X轴方向的运动仿真;
(8)第一、二肩关节,肘关节Y轴方向,腕关节Z轴方向的运动仿真。
4.2 仿真方法
运动仿真是结构设计的一个重要内容,在Pro/E的Mechanism模块中,通过对机构添加运动副、驱动器使其运动起来,来实现机构的运动仿真。在整体设计后, 通过仿真可以模拟机构的运动,从而检查机构的运动是否达到设计要求,是否发生干涉,实现机构的设计与运动轨迹校核。同时,可直接分析各运动副与构件在某一时刻的位置、运动量以及各运动副之间的相互运动关系及关键部件的 32、受力情况。在Pro/E环境下进行机构的运动仿真分析,不需要复杂的数学建模、也不需要复杂的计算机语言编程,而是以实体模型为基础,集设计与运动分析于一体,实现产品设计、分析的参数化和全相关,反映机构的真实运动情况[32]。
本文以PTC公司的三维建模软件Pro/E及其中的运动学仿真功能建立气动机械手关节的运动仿真模型。首先在Pro/E中建立气动机械手关节的三维模型,然后完成整个机械手的装配,设置关节的安装位置为机构运动的初始位置,添加驱动和约束,进行运动仿真。在整个过程中,需要对建立模型等前续工作进行不断的修改和完善,才能生成所要求的气动机械手关节的仿真模型。
4.3气动机械手关节的运动学分析 33、
仿真时,气动肌肉作为动力源,极限位置是气动肌肉与转动轴(铰链点)在同一条直线上,即出现死点的位置。
4.3.1第一肩关节的运动仿真及分析
第一肩关节运动前后的位置如图4-1(a)和4-1(b)所示。在此运动过程中,无干涉现象,通过测量极限位置的角度,得到=29.4º,所以第一肩关节绕Z轴的实际最大运动范围为(29.4º,29.4º)。
(a)运动前 (b)运动后
图4-1 第一肩关节仿真效果图
4.3.2第二肩关节的运动仿真及分析
第二肩关节运动前后的位置如图4-2(a)和4-2(b)所示。在此运动过程中,无干涉现象 34、,通过测量极限位置的角度,得到=44.5º,所以第二肩关节绕X轴的实际最大运动范围为(44.5º,44.5º)。
(a)运动前 (b)运动后
图4-2 第二肩关节仿真效果图
4.3.3肘关节X轴方向的运动仿真及分析
肘关节X轴方向运动前后的位置如图4-3所示,其中图(a)表示向上转动,图(b)表示向下转动。在此过程中,均发生干涉现象,发生图(a)现象的原因是:①肘关节有一块挡板连接板,向上转动时气动肌肉碰到挡板连接板而发生干涉;②由于挡板上的铰链点的距离太近,在运动到极限位置之前,两对气动肌肉就已发生了干涉。发生图(b)现 35、象是由于原因②。
(a1)运动前 (a2)运动后
(a) 向上转动
(b1)运动前 (b2)运动后
(b)向下转动
图4-3肘关节X轴方向仿真效果图
其中原因①是无法解决的,不过可以通过增加挡板的长度来增加向上转过的角度;原因②可以通过增加挡板上的铰链点的距离(如图3-3)即AB=2a的长度来改善,值得一提的是改变a的长度,A点不能运行到A1的位置,这里取a=25mm。相应的腕关节在X轴方向上的a=25mm。修改后的肘关节X轴方向运动到极限位置的效果图如图 36、4-4所示。绕X轴的运动范围为(60.4 º,32.6 º)。
(a1)运动前 (a2)运动后
(a) 向上转动
(b1)运动前 (b2)运动后
(b)向下转动
图4-4修改后肘关节X轴方向仿真效果图
4.3.4肘关节Y轴方向的运动仿真及分析
肘关节Y轴方向运动前后的位置如图4-5(a)和4-5(b)所示。在此过程中无干涉现象,通过通过测量极限位置的角度,得到=29.4º,所以肘关节绕Y轴的实际最大运动范围为(29.4º,29.4º)。
(a)运动前 37、 (b)运动后
图4-5 肘关节Y轴方向仿真效果图
4.3.5腕关节X轴方向的运动仿真及分析
腕关节在X轴方向上的零件尺寸已经根据肘关节在X轴方向的零件尺寸进行修改。运动前后的位置如图4-6(a)和4-6(b)所示。在仿真过程中,无干涉现象,通过测量极限位置的角度,得到= 70.7º,所以腕关节绕Z轴的实际最大运动范围为(70.7º,70.7º)。
(a)运动前 (b)运动后
图4-6 腕关节X轴方向仿真效果图
4.3.6腕关节Z轴方向的运动仿真及分析
腕关节Z 38、轴方向运动前后的位置如图4-7(a)和4-7(b)所示。此过程中无干涉现象,通过通过测量极限位置的角度,得到=29.4º,所以腕关节绕X轴的实际最大运动范围为(29.4º,29.4º)。
(a)运动前 (b)运动后
图4-7 腕关节Z轴方向仿真效果图
4.3.7第一、二肩关节,肘关节X轴方向,腕关节X轴方向的运动仿真及分析
第一、二肩关节,肘关节X轴方向,腕关节X轴方向运动前后的位置如图4-8(a)和4-8(b)所示。在此过程中无干涉现象,说明此次设计的气动机械手能在预期的范围内进行运动。
(a)运动前 39、 (b)运动后
图4-8 总运动效果图(1)
4.3.8第一、二肩关节,肘关节Y轴方向,腕关节Z轴方向的运动仿真及分析
第一、二肩关节,肘关节Y轴方向,腕关节Z轴方向运动前后的位置如图
4-9(a)和4-9(b)所示。在此过程中无干涉现象,说明此次设计的气动机械手能在预期的范围内进行运动。
(a)运动前 (b)运动后
图4-9 总运动效果图(2)
第5章 结论
本文设计了一个全部由气动肌肉驱动的机械手,从整体结构到各个关节、手臂零件的设计,通过理论计算和三维模拟 40、仿真,对各个关节进行优化,最终实现气动机械手关节最大的运动范围,满足预期设计要求。
各个关节的最大运动范围如下:
(1)肩关节
第一肩关节 (29.4º,29.4º)
第二肩关节 (44.5º,44.5º)
(2)肘关节
肘关节X轴方向 (60.4 º,32.6 º)
肘关节Y轴方向 (29.4º,29.4º)
(3)腕关节
腕关节X轴方向 (70.7º,70.7º)
腕关节Z轴方向 (29.4º,29.4º)
该机械手能够实现4个自由度的运动,气动肌肉具有控制精确的特点,在抓取物品等进行生产实践时,能够实现高精度的动作,基本满足了实际应用需要。
该气动机械手具 41、有轻巧、安全和控制简单等特点,可以用于工厂机器人,服务机器人等和人密切接触的场合。
参考文献
[1] 徐炳辉.气动手册[M].上海科学技术出版社,2005.26~28.
[2] SMC(中国)有限公司.现代实用技术[M].北京:机械工业出版社,2005.36~37.
[3] 隋立明, 张立勋.气动肌肉驱动仿生关节的理论分析[J].机床与液压,2007, 35(6):218~219.
[4] Qiu Yangzhen, Lin Yimeng. Research and Applications of High Precision Pneumatic 42、Manipulator.Hydraulic Pressure and Pneumatic[J]. 2006, 28(4):55~56.
[5] 王雄耀.近代气动机器人(气动机械手)的发展及应用[J].液压与气动技,1999, 12(5):13~16.
[6] 姜继海,宋锦春,高常识.液压与气压传动[M].高等教育出版社,2002.52~54.
[7] B.Tondu,P.Lopez.Modeling and control of McKibben artificial muscle robot actuators[J].IEEE Control System Magazine,2000, 43、 27(6):15~38.
[8]上海工业大学流控研究室.气动技术基础[M].机械工业出版社,1982.21~22.
[9] 杜来林,等.液压与气压传动[M].北京大学出版社,2005.10~13.
[10] 郑洪生.气压传动[M].机械工业出版社,2004.108~110.
[11] [德]Wemer Deppert KunStdl.气动技术——低成本综合自动化[M].李宝仁,译.机械工业出版社,1999.63~64.
[12] 王孝华,赵中林,等.气动元件及系统的使用与维修[M].机械工业出版社,1996.21~22.
[13] [美]Saeed B.Niku.机器人学 44、导论——分析、系统及应用[M].孙富春,朱纪洪,刘国栋等译.孙增圻,审校.电子工业出版社,2004.56~57.
[14] 齐进凯,陈冰冰.基于Pro/Engineer的气动机械手参数化设计[J].机械设计,2000, 22(2):257~258.
[15] 蔡自兴.机器人学[M].北京:清华大学出版社,2000.154~155.
[16]Tbndu B,Lopez.P Modeling and control of mckibben artificial muscle robot aetuatom[J].IEEE Control systems Magazine 2000, 5(7): 45、15~38.
[17] 袁子荣.液气压传动与控制[M].重庆大学出版社,2002.122~124.
[18] 葛宜远.流体传动及控制技术的新成就[J].液压与气动,1998, 16(2):1~3.
[19] 路甬祥.气动技术的发展方向[J].液压与气动,1991, 5(2):2~3.
[20] 许炳辉.气动技术基础知识[J].液压与气动,1994, 5(1):39~41.
[21] J.L.Shear.Study of pneumatic process in the continuous control of motion with compressed air-L[M].Tran 46、s of ASME,1956.233~241.
[22] Zhou Hong. Intelligent pneumatic-The latest trend in pneumatic actuators and control systems[M].Proceeding of the 4th International Conference on Fluid Power Transmission and Control,1997.335~348.
[23] 陆鑫盛,周洪.气动自动化系统的优化设计[M].上海科学技术文献出版社,1999.86~89.
[24] 陈新元,张安龙.装配线机械手 47、电气混合控制[J].液压与气动,2007, 13(3):46~47.
[25] 蔡自兴.机器人学[M].北京:清华大学出版社,2000.59~60.
[26] 路甬祥. 液压气动技术手册[M].机械工业出版社,2003.10~12.
[27] 隋立明,王祖温,包钢.气动肌肉驱动仿人臂的设计[J].液压与气动.2004, 10(9):7~8.
[28] 刘辛军,汪劲松,高峰,金振林.一种串并联结构拟人七自由度冗余手臂的设计[J].中国机械工程,
2002, 13(2):101~104.
[29] 吴伟国,邓喜君,蔡鹤皋.基于改进PYR型全方位关节的7自由度仿人手臂设计[J]. 48、中国机械工程,1999, 10(12):1345~1346.
[30] 毛君,毕长飞.基于Pro/Engineer采煤机的三维动态仿真与优化设计[J].煤矿机械,2006, 27(6):990~994.
[31] 路甬祥.液压气动技术手册[M].机械工业出版社,2002.65~66.
[32] 隋立明,谭世江,赵铁,张立勋.气动肌肉的结构设计与制作[J].液压与气动. 2008, 17(2):48~49.
致 谢
本毕业论文是在我的导师教授的亲切关怀和悉心指导下完成的。她严肃的科学态度,严谨的治学精神,精益求精的工作作风,深深地感染和激励着我。从课题的选 49、择到项目的最终完成,老师都始终给予我细心的指导和不懈的支持。半年来,老师不仅在学业上给我以精心指导,同时还在思想、生活上给我以无微不至的关怀,在此谨向老师致以诚挚的谢意和崇高的敬意。
在此我还要感谢研究生,正是由于她的帮助和支持,我才能克服一个一个的困难和疑惑,直至本文的顺利完成。
在论文即将完成之际,我的心情无法平静,从开始进入课题到论文的顺利完成,有多少可敬的师长、同学、朋友给了我无言的帮助,在这里请接受我诚挚的谢意!同时感谢培养我长大含辛茹苦的父母,谢谢你们!
最后感谢我的母校——大学四年来对我的栽培。
(注:可编辑下载,若有不当之处,请指正,谢谢!)
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 36个关键词详解2025政府工作报告
- 学习2025年政府工作报告中的八大科技关键词
- 2025年政府工作报告要点速览接续奋斗共谱新篇
- 学习2025政府工作报告里的加减乘除
- 深化农村改革党课ppt课件(20250305)
- 弘扬雷锋精神凝聚奋进力量学习雷锋精神的丰富内涵和时代价值
- 深化农村改革推进乡村全面振兴心得体会范文(三篇)
- 2025年民营企业座谈会深度解读PPT课件
- 领导干部2024年述职述廉述责述学述法个人报告范文(四篇)
- 读懂2025中央一号党课ppt课件
- 2025年道路运输企业主要负责人安全考试练习题[含答案]
- 2024四川省雅安市中考英语真题[含答案]
- 2024湖南省中考英语真题[含答案]
- 2024宁夏中考英语真题[含答案]
- 2024四川省内江市中考英语真题[含答案]
